|
Sistema de Modelação MOHID 2000 |
|
|

2.4.2 Discretização Horizontal
3 Módulo de Transporte Lagrangeano
3.1 Deslocamento dos traçadores
3.2.1 Inactivação bacteriológica
3.2.2 Sedimentação/Ressuspensão
4 Interface Gráfica do modelo Mohid
4.1 Organização de um projecto
4.4 Visualização dos resultados
1
Introdução
A
ferramenta numérica utilizada para definir os limites dos estuários
Portugueses Sistema MOHID. O desenvolvimento deste
sistema iniciou-se em na década de 80 (Neves, 1985), tendo vindo a ser objecto
de sucessivos aperfeiçoamentos na sequência da respectiva aplicação a
diferentes projectos científicos e tecnológicos. Actualmente este sistema de
modelação matemática pode ser classificado com um dos mais elaborados entre os
sistemas existentes deste tipo, nomeadamente no que respeita às inovações na
coordenada vertical e à programação robusta e fiável.
O sistema MOHID
foi programado recorrendo a programação orientada por objectos, utilizando o ANSI
Fortran 95. O sistema se encontra dividido em diferentes módulos, podendo
cada um deles ser entendido com um modelo específico, sendo no entanto o
sistema composto por um único ficheiro executável.
A
utilização do ANSI Fortran 95 garante a independência do sistema MOHID
face ao sistema operativo no qual se pretende executar o modelo (Windows,
Linux, Unix, etc.) e uma fácil implementação do código em
qualquer ambiente. O tempo de execução do programa (tempo simulado versus
tempo da unidade central de processamento) varia em função da malha de cálculo
e do passo de tempo utilizado. No entanto, a possibilidade de correr os vários
módulos (hidrodinâmica, turbulência, deriva, etc.) com passos de tempo
diferentes permite uma optimização do tempo de cálculo necessário para a
execução das simulações.
Tirando
partido das novas funcionalidades do Fortran 95, o sistema utiliza a
alocação dinâmica da memória, se tornando assim mais versátil, optimizando o
uso dos recursos do computador e permitindo utilizar um único executável
independentemente das dimensões do domínio de cálculo a utilizar.
O sistema MOHID
pode ser divido em quatro grandes classes:
q
duas
gerem as propriedades do escoamento não turbulentas (ex. velocidade, elevação,
fluxos de água) e turbulentas (viscosidade turbulenta, difusividade, energia
cinética turbulenta, comprimentos de mistura). A evolução das propriedades em
ambas as classes é calculada num referencial euleriano pelo método dos volumes
finitos.
q
as
outras duas classes gerem as propriedades da água (ex. salinidade, temperatura,
densidade, sedimentos coesivos, parâmetros de qualidade). Uma destas classes
resolve a evolução das propriedades também num referencial euleriano pelo
método dos volumes finitos. A outra classe simula a evolução das propriedades
num referencial lagrangeano, esta classe é a base do módulo de deriva.
A técnica
de volumes finitos consiste em aplicar as leis (físicas, químicas e
biológicas), que regem os processos que se pretendem simular, directamente a um
volume de controlo na forma de uma divergência de um fluxo. Como consequência,
este método garante automaticamente a conservação de massa das propriedades
simuladas (Adcroft et al., 1997).
A classe
responsável pela evolução das propriedades da água num referencial lagrangeano
evoluiu de um modelo de traçadores lagrangeanos utilizado nas versões
anteriores do MOHID (Leitão, 1997). Hoje em dia o modelo lagrangeano
pode ser utilizado para simular uma diversidade de processos de transporte e de
qualidade da água bem como a deriva de manchas de petróleo (Silva, 1997).
As quatro
grandes classes acima referidas se encontram repartidas por mais de 40 módulos
que constituem o sistema MOHID perfazendo um total mais de 140 mil
linhas de código.
A
programação orientada por objectos utilizada na programação do modelo torna a
sua utilização, tal como a sua expansão, muito robusta (Miranda et al.,
2000). Este tipo de programação tem provado ser uma metodologia muito útil no
desenvolvimento de programas complexos, em especial para aqueles que têm por
objectivo simular problemas “do mundo real” (Decyk et al., 1998), dos
quais a modelação de processos marinhos ou estuarinos se constituem como
exemplos. A comunicação entre os módulos é feita numa base de cliente/servidor
garantindo assim o encapsulamento da informação de cada módulo (Duffy, 1995).
Ao longo da
sua existência, o modelo MOHID tem vindo a ser utilizado em inúmeros
casos de estudo entre os quais se podem encontrar zonas com características
muito diferentes como sejam o caso do oceano profundo (casos do Atlântico
Nordeste, no âmbito do projecto Omex, e do mar Mediterrâneo, no âmbito
do projecto EuroModel), zonas fluviais e estuarinas, zonas costeiras,
lagoas e albufeiras.
2
Módulo
Hidrodinâmico
O módulo
hidrodinâmico do sistema Mohid resolve as equações primitivas do movimento no
espaço tridimensional. A discretização espacial destas equações é feita
utilizando uma técnica de volumes finitos a qual permite a utilização de um
sistema de coordenadas verticais genérico. A discretização temporal é baseada
na utilização de um esquema semi-implícito.
O modelo
permite a consideração de condições de fronteira abertas ou fechadas. As
condições de fronteira abertas podem ser do tipo nível imposto, radiativas ou
um misto das duas.
A
versatilidade do módulo hidrodinâmico permite que se proponha esta como a única
ferramenta para simular o escoamento em todos os locais onde serão elaborados
cenários de derrames independentemente da complexidade da respectiva geometria.
No texto
que se segue é apresentada uma descrição do modelo incluindo as equações
resolvidas, o fecho turbulento, as condições de fronteira aberta e a geometria
vertical do modelo.
2.1
Equações
resolvidas
As equações
resolvidas pelo módulo hidrodinâmico têm todas por base a equação que descreve
na forma integral da evolução de uma variável genérica P, no interior de um
volume de controle:
sendo A a
superfície que define a fronteira do volume controle e V o integral de
superfície de![]() corresponde ao fluxo da propriedade P através de A.
corresponde ao fluxo da propriedade P através de A.
O módulo
hidrodinâmico tem como objectivo simular a evolução das propriedades do
escoamento. As velocidades segundo X e Y (horizontais) são umas dessas
propriedades, as quais são calculadas com base na equação (1) e admitindo que:
![]()
![]()
As forças
gravíticas englobam as forças de atração gravítica exercidas sobre o volume de
controle em estudo pelo planeta Terra  , pela Lua e pelo Sol (potencial da maré).
, pela Lua e pelo Sol (potencial da maré).
O potencial
de maré é um termo que adquire importância em domínios de grandes dimensões, da
ordem das centenas de km, sendo resolvido com base na formulação proposta por
Choi et al. (1997).
As forças
de pressão e as forças viscosas são exercidas sobre a superfície fronteira do
volume de controle e resultam da interação deste com o meio envolvente. As
forças de pressão são normais à superfície de fronteira ![]() enquanto que as
forças viscosas
enquanto que as
forças viscosas ![]() podem ser
subdivididas em tangenciais e normais.
podem ser
subdivididas em tangenciais e normais.
No que diz
respeito às forças viscosas tangenciais é necessário definir condições de
fronteira no fundo e à superfície. No fundo é utilizada uma lei quadrática em
que a tensão de corte é igual ao coeficiente Chezy vezes o quadrado da
velocidade. Na superfície, caso um dos agentes forçadores seja o vento, a
tensão de corte é a tensão de corte do vento caso contrário o seu valor é nulo.
Outra
propriedade fundamental a ter em consideração é a nível da superfície livre
cuja evolução é calculada com base na equação (1) admitindo que o meio é 2D, isto é, a sua evolução só
é condicionada pelos fluxos de água. Neste caso os termos da equação se podem
escrever na forma:
P = r![]()
Fontes – Poços = Descargas + Precipitação -
Evaporação
A equação (1) se torna então numa equação de conservação de massa
2D:
![]() Descargas + Precipitação – Evaporação (2)
Descargas + Precipitação – Evaporação (2)
Ao
contrário da equação anterior em que a propriedade transportada era a
incógnita, aqui a propriedade é conhecida (r) e a incógnita é o próprio volume
de controle.
Uma vez que
se trata de um abordagem 3D é ainda necessário especificar uma equação para o
cálculo da velocidade vertical, a qual é obtida a partir da equação de
conservação de massa anteriormente descrita admitindo a hipótese hidrostática.
2.2
Principais
aproximações
A equação (1) aplicada à conservação de quantidade de movimento é
válida para um referencial fixo. No entanto, o referencial natural, a Terra,
está em permanente rotação, sendo o efeito desta rotação sobre o escoamento
usualmente contabilizado na forma de uma força inercial denominada força de Coriólis.
Outra
aproximação, usualmente efectuada na aplicação da lei de conservação de
quantidade de movimento a escoamentos oceânicos e costeiros, explora o fato das
variações de densidade da água nestes casos ser muito pequena, menos de 3%.
Neste caso a densidade pode ser considerada constante para o cálculo da sua
massa e forças de inércia, excepto para as forças que são função da aceleração
da gravidade. A esta simplificação chama-se aproximação de Boussinesq.
Uma
terceira simplificação adoptada tem em consideração que, no oceano e em águas
costeiras, as escalas na vertical são pequenas e, consequentemente, o
escoamento tem de uma forma geral velocidades muito baixas nessa direcção. Para
além da dimensão das escalas verticais a estratificação vertical de densidade
estável tem também um papel importante, porque tende a inibir qualquer
movimento vertical por acção da impulsão. As acelerações verticais são baixas
tal como as forças viscosas. O fluido por sua vez, no que diz respeito aos
movimentos verticais, se comporta como se estivesse num equilíbrio estático.
Nestas condições é válida a hipótese hidrostática, isto é, é possível desprezar
todos os termos de inércia e admitir que o gradiente de pressão vertical está
em equilíbrio com a força da gravidade. A pressão, no caso da hipótese
hidrostática, é então apenas função da profundidade e do gradiente vertical de
densidade.
Na
discretização do termo de pressão se optou pela divisão deste numa componente
barotrópica e outra baroclínica. A primeira contabiliza o efeito do gradiente
de nível sobre a pressão, enquanto a segunda contabiliza o efeito do gradiente
de densidade. Esta divisão permite correlacionar directamente a
variação da superfície livre com a pressão (barotrópica). Desta forma a
superfície livre pode ser utilizada para calcular o volume de controle e
simultaneamente servir como estimativa da pressão barotrópica. Por outro lado,
se podem aplicar métodos numéricos diferentes a cada um dos termos.
Na
perspectiva da oceanografia, esta divisão pode também ser encarada como uma
divisão de modos: a pressão barotrópica força o modo externo, responsável por
simular as ondas gravíticas da superfície livre (cf. Figura
1) que apresentam uma celeridade muito superior à
dos modos internos. Estes últimos, do ponto de vista físico têm um número
infinito e são forçados pela pressão baroclínica, sendo a sua fase visível a
propagação das chamadas ondas internas (cf. Figura
2).
Figura 1- Propagação de uma onda de superfície livre simulada
pelo sistema Mohid. Neste caso esquemático a onda é imposta num pequeno canal
situado no lado direito do domínio e radiada pelas outras três fronteiras.
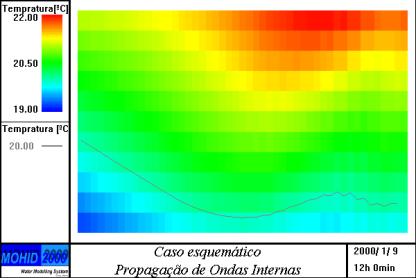
Figura 2- Propagação de uma onda interna simulada pelo
sistema Mohid. Simulação da propagação de ondas internas ao longo de um canal
com 50 km e 1000 m de profundidade com uma estratificação inicial linear de
temperatura (24ºC à superfície e 4 ºC no fundo). A figura mostra a variação da
isolinha dos 20 ºC ao longo de todo o canal e entre os 150 e 250 m de
profundidade. O canal tem fronteira aberta (radiação) do lado direito e fechada
do lado esquerdo, as ondas internas são formadas extraindo, nas três primeiras
células a contar do lado esquerdo, calor da superfície a uma taxa de 300 W/m2.
A
consideração das aproximações à lei de conservação de quantidade de movimento,
apresentadas anteriormente, dão origem à equação ( 3).
 ( 3)
( 3)
O módulo
hidrodinâmico resolve assim a equação de conservação de quantidade de movimento
3D ( 3) para calcular as componentes horizontais da
velocidade e uma equação de conservação de massa ( (2), para um meio 2D, para calcular a variação da
superfície livre no tempo. Finalmente resolve mais uma vez a equação (2), agora para um meio 3D, para calcular a velocidade
vertical do escoamento.
A densidade
é calculada com base na equação de estado para a salinidade e a temperatura
(Leendertsee e Liu, 1978):
![]() ( 4)
( 4)
Os valores
de salinidade e de temperatura são calculados com base num módulo independente
da hidrodinâmica responsável pela evolução relativa a um referencial euleriano de
todas as propriedades da água o qual resolve a equação (1) aplicada a um meio 3D.
A
temperatura e a salinidade podem ser valores constantes ou evoluir no tempo
devido ao efeito do transporte por parte do escoamento de descargas pontuais,
de fluxos à superfície, de trocas de calor no caso da temperatura (radiação
solar, radiação infravermelha, calor latente e sensível) e trocas de massa no
caso da salinidade (evaporação/precipitação).
2.3
Fecho
turbulento
A resolução
numérica das equações do módulo hidrodinâmico além de ser discreta no espaço
também o é no tempo. Por este motivo, o módulo hidrodinâmico resolve na
realidade as equações apresentadas anteriormente com base numa decomposição à
Reynolds.
Esta
decomposição pode ser perspectivada como uma filtragem temporal, em que os
valores instantâneos das propriedades (![]() )são substituídos por quantidades médias (
)são substituídos por quantidades médias (![]() ) mais flutuações turbulentas (
) mais flutuações turbulentas (![]() ).
).
A
integração temporal da equação (
3) permite escrevê-la em termos de valores médios
surgindo, devido aos efeitos não lineares, termos adicionais (tensores de
Reynolds). Estes termos representam a contribuição do transporte turbulento
para o campo médio e podem ser vistos como o transporte das flutuações do campo
variável em estudo pelas flutuações do campo da velocidade.
Levanta-se assim um novo problema usualmente designado por “fecho da
teoria da turbulência”. Existem diversos métodos de resolver este problema
sendo comum admitir que este novo termo é proporcional ao gradiente da
propriedade média transportada, ou seja:
![]() (
5)
(
5)
A variável uT é designada por viscosidade
turbulenta. Nos casos em que o meio possa ser considerado isotrópico se pode
admitir que uT é constante. Caso contrário é
necessário calcular para cada uma das direcções um valor, ![]() .
.
Na maioria dos casos se admite ![]() , uma vez que na horizontal os processos normalmente se podem
considerar homogéneos. A grande diferença reside nas escalas características
das direcções horizontal e vertical. Nesta perspectiva, o coeficiente de
viscosidade turbulenta pode ser dividido em viscosidade turbulenta horizontal e
vertical,
, uma vez que na horizontal os processos normalmente se podem
considerar homogéneos. A grande diferença reside nas escalas características
das direcções horizontal e vertical. Nesta perspectiva, o coeficiente de
viscosidade turbulenta pode ser dividido em viscosidade turbulenta horizontal e
vertical, ![]() .
.
Uma vez que se admitiu que o novo termo tem uma natureza matemática
semelhante ao termo das forças viscosas, a sua ordem de grandeza é facilmente
comparável. As escalas normalmente resolvidas pelos modelos hidrodinâmicos são
da ordem dos metros, a que corresponde uma viscosidade turbulenta várias ordens
de grandeza superiores à viscosidade molecular, pelo que as forças viscosas
podem ser consideradas desprezáveis.
Na horizontal o sistema Mohid permite três opções de parametrização da
viscosidade turbulenta nomeadamente: valor constante, Smagorinsky e
bi-harmónico.
O fecho turbulento vertical é feito com base o módulo de turbulência do
modelo GOTM (General Turbulence Ocean Model). Neste módulo se podem encontrar
um conjunto de diferentes modelos para a descrição das trocas turbulentas nas
camadas de mistura. Todos os modelos usam o principio de viscosidade
turbulenta, que permite obter os coeficientes de
troca turbulenta em função de propriedades do escoamento médio.
Entre os modelos introduzidos no GOTM, os fechos de segunda ordem de
duas equações (k-e e Mellor-Yamada) são os que
descrevem mais realisticamente a turbulência nas camadas limite de superfície e
fundo, com um detalhe que permite a sua utilização num modelo tridimensional
sem um custo computacional elevado.
Os modelos k-e e Mellor-Yamada mais evoluídos no
modelo GOTM (e portanto no sistema MOHID) diferem da versão standard na escolha
dos parâmetros nas equações de transporte que controlam a transição a condições
de estratificação estável e na utilização de funções de estabilidade,
numericamente estáveis, que consideram mais correlações no fecho da
turbulência. Isto permite uma melhor descrição da camada de mistura para
distintos escoamentos como tem sido demostrado em diversas aplicações a
distintos ambientes tanto em plataformas continentais como em estuários e em
oceano aberto.
O modelo também incorpora parametrizações dos coeficientes turbulentos
no interior do oceano, isto é, onde os processos de estratificação dominam
sobre as tensões de corte criadas na superfície e no fundo. Para mais
informação sobre as aplicações e os avanços teóricos no modulo de turbulência
do modelo GOTM pode consultar-se a página web (http://www.gotm.net).
Os modelos de turbulência de duas equações no sistema MOHID (k-e e Mellor-Yamada) calculam os
coeficientes de troca turbulenta (para o momento nt para o momento e n’t para o calor) a partir da
expressão:
 (6)
(6)
onde k representa a energia cinética turbulenta, L a escala de
comprimento característica dos movimentos turbulentos e cm e c´m , as funções de estabilidade para o momento e os escalares,
respectivamente.
A energia cinética turbulenta é calculada com base numa equação de
transporte:
![]() (7)
(7)
onde a evolução temporal da TKE é um balanço dum termo difusivo, um
termo de produção pela tensão de corte do escoamento médio P, um termo B , que
dá conta das trocas entre TKE e energia potencial e um termo disipativo e que é sempre um poço e representa a
dissipação da TKE em energia térmica.
No modelo de Mellor-Yamada o comprimento característico da turbulência é
calculado mediante uma equação de transporte da forma:
![]() (8)
(8)
e no modelo k-e calcula a dissipação da TKE, que se
relaciona com o comprimento turbulento pela expressão:
 (9)
(9)
A equação de transporte para a dissipação da TKE é da forma:
 (10)
(10)
Embora os modelos standard k-e e Mellor-Yamada possam ser
utilizados no MOHID, a eleição do valor de ce3 e as funções de estabilidade para
as quais se obtêm resultados mais realistas em distintas situações são diferentes
das standard, permitindo
uma melhoria sensível na descrição da dinâmica das camadas de mistura.
2.4
Discretização
Espacial
A maior
parte dos modelos hidrodinâmicos utilizam na discretização espacial
das equações o método das diferenças finitas ou o métodos dos elementos
finitos. Um método menos divulgado é o dos volumes finitos. Neste caso o ponto
de partida são equações aplicadas a volumes de controle tal como foram
apresentadas anteriormente. Desta forma a malha é definida explicitamente e as
equações são resolvidas sempre da mesma forma independentemente da geometria
das células. Uma vez que as equações são sempre resolvidas na forma de uma
divergência de um fluxo, este método
garante a conservação das propriedades transportadas (Ferziger e Perić,
1995 e Vinokur, 1989).
Apesar de,
no módulo hidrodinâmico aqui apresentado, se ter optado por volumes finitos com
uma malha estruturada por uma questão de simplicidade de discretização e
eficiência de cálculo, esta metodologia pode ser aplicada facilmente a malhas
não estruturadas. Esta metodologia foi utilizada por Chippada et al.
(1998) para simular processos costeiros tendo utilizado uma malha não
estruturada de volumes de controle na forma de triângulos.
2.4.1
Discretização
Vertical
Tal como na
horizontal, na discretização vertical é comum a utilização de transformação de
coordenadas para optimizar a precisão da malha. Na vertical este problema é
ainda mais importante porque os gradientes são normalmente muito superiores.
Uma discretização grosseira na vertical pode dar origem a excesso de difusão
numérica e pode tornar impraticável, por exemplo, a simulação do efeito da
estratificação sobre um escoamento.
Uma das
principais características dos modelos oceânicos e costeiros de diferenças
finitas é a abordagem que adoptam para a discretização vertical. As
discretizações mais conhecidas são: a sigma, a isopícnica e a cartesiana. A
partir desta característica é possível
antever que, por exemplo, um modelo sigma (ex: POM, SCRUM) é uma boa ferramenta
para o estudo de meios bem misturados que sigam a topografia do fundo, mas já
não são em meios estratificados com fortes gradientes de topografia.
Um modelo
de coordenadas isopícnicas pode ser uma boa solução para simular meios
estratificados onde o escoamento seja forçado pela densidade. Neste tipo de
discretização as camadas da malha coincidem com linhas de iso-densidade tendo
por objectivo de minimizar a difusão numérica entre camadas, partindo do
pressuposto que o escoamento se faz preferencialmente ao longo destas linha e
que a estratificação vertical inibe trocas significativas entre camadas. Em
regiões influenciadas pelo fundo, pela inércia ou em presença de escoamentos
secundários o campo de velocidades possui uma componente importante na direcção
perpendicular às isopícnicas (linhas de igual densidade), contrariando os
pressupostos deste modelo.
Por fim a
malha cartesiana pode ser uma boa solução nos casos em que as duas
discretizações anteriores falham, como seja por exemplo o escoamento ao longo
do talude da plataforma continental (Neves et al., 2000). Neste caso a
influência da topografia é
caracterizada por fortes gradientes e o escoamento não segue as
isopícnicas.
Tendo em
consideração a variabilidade de comportamentos que é possível encontrar na
natureza, se pode dizer que na maioria das aplicações não existe uma
discretização que seja a que melhor se adapte à simulação de todo o domínio,
verificando-se que, por vezes, a melhor solução seria discretizar de forma
diferente vários sectores do domínio.
Os modelos
dupla-sigma (Deleersnijder e Beckers, 1992 e Santos, 1995) constituem uma
tentativa de resposta para este tipo de problemas. Neste caso a coluna de água
é dividida em dois domínios sigma: um do fundo até uma profundidade constante,
normalmente a base da camada de mistura, e outro, por cima, onde é aplicada uma
segunda discretização sigma, que só acompanha o fundo nas pequenas
profundidades, evitando assim uma malha muito distorcida, em especial, nas
zonas profundas (> 1000 m). Ao evitar esta distorção o modelo minimiza a
mistura vertical associada à difusão numérica horizontal.
Este tipo
de modelos que combinam diferentes discretizações, apesar de poderem
representar uma solução para alguns problemas, continuam no entanto a
apresentar pouca flexibilidade.
A solução
mais eficiente será então recorrer a um modelo que não dependa de um tipo
limitado de discretizações e que permita ao utilizador criar novas
discretizações sem muito esforço.
Os modelos
de volumes finitos permitem uma grande flexibilidade, ao nível da discretização
espacial, uma vez que a geometria é introduzida duma forma explícita através
das áreas e volumes de cada célula. Esta versatilidade permite subdividir o
domínio tanto na horizontal como na vertical, em zonas com diferentes
discretizações (cf. Figura 3).
Figura 3 – Malha ilustrativa das potencialidades de discretização
vertical do sistema Mohid.
Esta
metodologia possibilita igualmente o desenvolvimento, sem muito esforço, de
coordenadas verticais alternativas que melhor se adaptem a um caso particular.
Este é o caso da coordenada Lagrangeana que foi desenvolvida para minimizar as
trocas entre camadas (Figura
4), sendo possível assim reduzir ao mínimo a
difusão numérica associada ao transporte horizontal (Neves et al., 2000).
As
coordenadas cartesianas tradicionais consideram cada camada com uma espessura
constante ao longo de todo o domínio. Esta regra rígida levanta problemas na
discretização do fundo. Uma solução alternativa é a utilização do conceito de
células cortadas (shaved cells), que consiste em garantir que, junto ao
fundo, a espessura da camada é igual à profundidade menos o nível da face mais
próxima do fundo (Figura
4b). Este tipo de metodologia é extremamente
simples de implementar em modelos de volumes finitos (Adcroft e Marshall, 1997,
Martins et al., 2000).
|
|
|
|
(a) |
(b) |
Figura
4 – Cortes verticais mostrando
escoamentos secundários num talude. A figura a) apresenta resultados obtidos
com uma malha Lagrangeana que foi incializada com uma configuração de malha
sigma enquanto a figura b) representa o mesmo escoamento com uma malha
cartesiana com células cortadas junto ao fundo.
Tendo por
objectivo a resolução de problemas específicos, e tirando partido da
flexibilidade do sistema Mohid neste aspeto, foram implementadas no sistema
outras discretizações inovadoras, como seja o caso da discretização designada
de “Harmónica”, a qual foi implementada para permitir correr o sistema Mohid em
Albufeiras. Nestes casos se verificam situações em que a superfície livre, num
ano seco, pode variar mais 30 m.
Tendo em
conta estas oscilações extremas foi desenvolvida uma coordenada que é inicializada
como se fosse cartesiana e quando o nível da albufeira começa a descer a
espessura da camada diminui à mesma velocidade até atingir uma espessura mínima
quando essa é atingida, o processo repete-se para a camada logo abaixo e assim
sucessivamente. Quando o nível da albufeira sobe as camadas que são expandidas
pela ordem inversa com que foram contraídas. Esta nova coordenada, permite de
uma forma eficiente, manter a estratificação da albufeira evitando todos os
problemas de difusão numérica associados à coordenada sigma (Braunschweig,
2001).
Outro
exemplo inovador é uma coordenada que melhora a parametrização do atrito no
fundo, a que se chamou de “espessura fixa”. Neste caso, admite-se que camadas
de espessura constante acompanham o fundo. Este tipo de coordenada é, utilizada
junto ao fundo e complementada por outro tipo de discretização vertical até à
superfície livre. Esta coordena permite que a distância à parede (fundo) das
velocidades calculadas mais perto do fundo seja sempre constante tornando o
calculo do atrito mais consistente e preciso.
A
flexibilidade do sistema Mohid ao nível da discretização vertical permite a
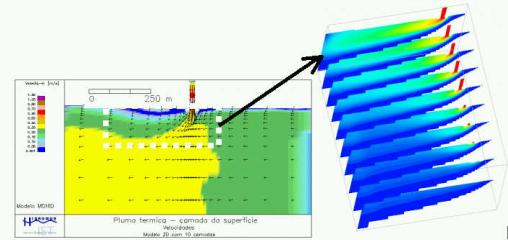
respectiva utilização tanto em ambientes oceânicos (cf. Figura 5), como escoamentos estuarinos (cf. Figura 6), em circulação em albufeiras (cf. Figura 7) ou até processos de pequena escala como seja a
dispersão de plumas térmicas (cf. Figura 8).
Figura 5 – Campo de correntes no Atlântico. Resultados
produzidas no âmbito do projecto cientifico europeu OMEX (Coelho et al., in
press).
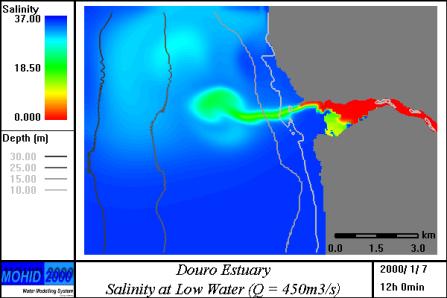
Figura 6 –
Campo de salinidades no estuário do Douro para uma situação de caudal médio e
baixa mar.
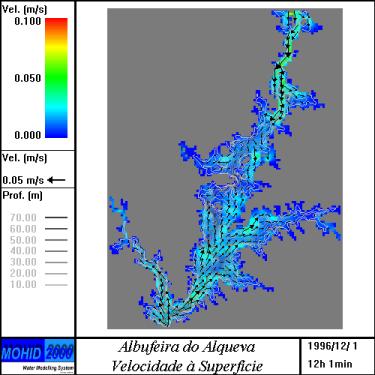
Figura 7 – Escoamento na futura Albufeira do Alqueva. Quando
a barragem desta albufeira estiver construída o Alqueva será o
maior lago artificial da Europa.
a) b)
Figura 8 – Simulação da dispersão da pluma térmica duma
central termoeléctrica situada perto de Lisboa. a) Campo de velocidades à
superfície b) campo vertical de temperatura.
2.4.2
Discretização
Horizontal
A resolução
horizontal do sistema Mohid é variável em sua extensão, permitindo a simulação
mais detalhada das correntes nas zonas dos terminais e consequentemente das
trajectórias das manchas de óleo (cf. Figura 9).
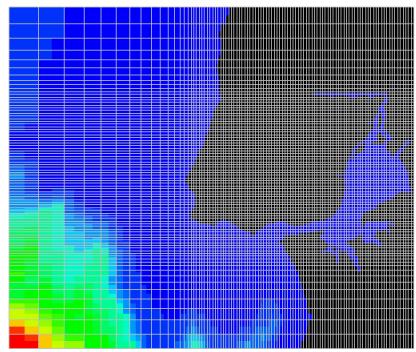
Figura 9- Exemplo de aplicação de passo variável ao estuário
do Tejo (Portugal).
O modelo
utiliza uma malha que na classificação proposta por Arakawa e Lamb (1977)
corresponde à malha C (cf. Figura 10). Este tipo de abordagem evita médias no cálculo
dos gradientes de pressão (barotrópica e baroclínica) e da divergência de
fluxos (continuidade: nível e traçadores).

Figura 10 –
Classificação de malhas 2D descentradas segundo Arakawa e Lamb (1977).
A
distribuição dos pontos de cálculo adotada para o cálculo das propriedades do
escoamento (h, vx, vy vz),
minimiza o número de interpolações, atribuindo maior importância ao cálculo dos
gradientes de pressão (barotrópica e baroclínica) e de divergência de fluxos
(continuidade: nível e traçadores). Implica no entanto a execução de médias
para calcular o termo de coriólis. Em qualquer dos casos, a precisão da solução
só está comprometida quando o passo da malha não permite resolver o raio de
deformação interno de Rossby (~40 km a 30º de latitude). Esta escala espacial
corresponde à distância horizontal ao longo da qual um fluido estratificado em
rotação é afectado quando perturbado. (11)
sendo c é a
celeridade da perturbação num meio estratificado.
Usualmente
os modelos globais utilizam uma malha do tipo B, uma vez que, mesmo recorrendo
a super-computadores a precisão destes modelos não é suficiente para resolver o
raio de deformação interno de Rossby. Existem já modelos que têm uma precisão
de 0.2º graus (Kantha and Clayson, 2000) antevendo, que num futuro próximo,
mesmo os modelos globais tenderão a utilizar malhas do tipo C. Este tipo de
malha é também a ideal para acoplar o modelos hidrodinâmicos a modelos de
propriedades da água uma vez que não é necessário recorrer a interpolações para
calcular a divergência de fluxos.
2.5
Discretização
Temporal
Os termos
que condicionam a estabilidade das equações são a pressão barotrópica (ondas
gravíticas), o atrito no fundo e a difusão vertical. Ao primeiro está associada
uma celeridade elevada, ![]() , sendo h a profundidade e g a aceleração
gravítica. A discretização do atrito levanta alguns problemas quando o
gradiente de velocidade junto ao fundo é muito intenso. Por fim a difusão
vertical introduz maiores dificuldades quando a discretização vertical é muito
fina.
, sendo h a profundidade e g a aceleração
gravítica. A discretização do atrito levanta alguns problemas quando o
gradiente de velocidade junto ao fundo é muito intenso. Por fim a difusão
vertical introduz maiores dificuldades quando a discretização vertical é muito
fina.
Como o
objectivo de não impôr limites muito restritivos aos critérios de estabilidade
foi adoptada uma discretização semi-implícita do tipo ADI “Alternante
Direction Implicit”). Os três termos que apresentam mais problemas de
estabilidade foram discretizados implicitamente, enquanto que para os restantes
se optou por uma abordagem explícita. A vantagem de um método semi-implícito
sobre um totalmente implícito é o sistema de equações resultante poder ser do
tipo tridiagonal. Estes sistemas são resolvidos de uma forma muito eficiente
pelo algoritmo de Thomas. Os métodos implícitos, quando aplicados a domínios 2D
e 3D, dão origem a sistemas de equações esparsos, sendo por isso, necessário
recorrer a métodos dispendiosos em termos de rapidez de cálculo.
O modelo
prevê ainda a possibilidade de utilização, em alternativa, de dois tipos de
discretizações semi-implícitas: uma que necessita da resolução de 6 equações em
cada passo temporal (cf. Figura 11) conhecido pelo esquema de Leendertse
(Leendertse, 1967) e outra baseada no esquema S21 (Abbott et al., 1973)
que envolve a resolução de 4 equações (cf. Figura 12).
Em ambos os
métodos o esquema ADI é aplicado à equação da continuidade (2D-horizontal) para
calcular a elevação da superfície livre. Basicamente, substituí-se
alternadamente todo (Leendertse) ou parte (S21) do integral da velocidade numa
direcção, por uma equação de conservação de quantidade de movimento, enquanto
na direcção perpendicular mantêm-se a velocidade explícita.
|
|
|
|
Figura 11 – Discretização temporal do método de 6 equações
proposto por Leendertse, 1967.
|
|
|
|
Figura 12 – Discretização temporal do método S21proposto por
Abbott et al., 1973.
2.6
Condições
de Fronteira
O modelo
permite a consideração de condições de fronteira abertas e fechadas. As
primeiras são usualmente utilizadas para definir a interacção do módulo
hidrodinâmico com outras massas de água, enquanto as segundas são utilizadas
para definir a linha de costa e os processos de cobertura e descobertura em
zonas intertidais.
As
condições de fronteira aberta podem ser divididas em dois tipos: passivas e
activas. Estas últimas são conhecidas à priori, isto é, são impostas e não
calculadas pelo modelo. Um exemplo deste tipo de fronteira é a imposição de uma
curva de maré para simular a hidrodinâmica de um estuário ou a imposição da
vazão de um rio para simular uma cunha salina. As condições de fronteira
passivas dependem da solução interna e têm como principal objectivo deixar sair
perturbações geradas dentro do domínio. As fronteiras radiativas são um exemplo
deste tipo de condição de fronteira, sendo utilizadas em diversos tipos de
aplicação: ondas de vento, escoamentos oceânicos e costeiros.
As
fronteiras fechadas podem-se dividir em fixas e móveis. As primeiras são
utilizadas para definir a linha de Costa, enquanto as segundas são extremamente
úteis para definir processos de cobertura e descobertura em zonas intertidais.
Tanto ao nível de fluxo de massa como de quantidade de movimento optou-se, por
defeito, por impor fluxo nulo ao longo destas fronteiras fechadas.
2.6.1
Fronteiras
abertas
Desde o
início do desenvolvimento do sistema Mohid, em 1985, as condições de fronteira
aberta foram eleitas como um dos principais temas de investigação. Este é um
tema complexo e exige um acompanhamento constante do estado da arte e
investigação das várias soluções.
Diversas
teses de doutoramento e mestrado (Aires, 1995, Silva, 1991, Villarreal 2001)
têm sido e se encontram ainda a ser desenvolvidas no seio da equipe responsável
pelo desenvolvimento e manutenção do sistema Mohid, das quais resultaram a
publicação de diversos artigos científicos que abordam esta temática (Neves e
Silva, 1991, Aires e Neves, 1991, Villarreal et al., in press, Coelho et
al., in press).
Ao longo do
tempo tem sido efectuada uma actualização constante das diferentes metodologias
propostas na bibliografia que provaram ser robustas em casos reais. A
experiência acumulada tem mostrado que não existe uma solução universal e que,
em cada caso, é necessário testar diferentes soluções, optando pela que menos
perturbe a solução e simultaneamente não deixe o modelo divergir.
A
metodologia para definir condições de fronteira abertas é extremamente
versátil. Uma forma que o utilizador tem de garantir que a simulação não tende
a divergir da solução conhecida, é definindo uma solução exterior (ou de
referência) e fornecê-la ao módulo hidrodinâmico na entrada de dados. Esta
solução exterior pode ser definida de uma forma contínua para cada ponto de
cálculo recorrendo a campos de propriedades definidos em ficheiros ASCII, que
podem ser constantes ou variáveis no tempo.
Outra
hipótese é definir a solução em alguns pontos, e o módulo hidrodinâmico durante
o Run interpolar a solução para os pontos fronteira. Esta é a
metodologia utilizada na imposição da maré. Esta abordagem tem a vantagem de
minimizar a entrada de dados. A informação pode ser dada na forma duma série
temporal ou na forma de componentes harmónicas no caso da maré.
A solução
exterior pode ser definida com base em medidas feitas especificamente para o
trabalho de modelação ou a partir de base de dados construídas por organismos
especializados em recolha e processamento de medidas. Caso não existam fontes
locais de medidas de salinidade, de temperatura, de ventos e maré, as fontes
alternativas usualmente utilizadas pelo grupo de utilizadores do Mohid são
bases de dados disponíveis na internet que disponibilizam informação para todo
o mundo como é o caso da NOAA (Levitus e Boyer, 1994 e Levitus et al., 1994) cujos dados climatológicos
de salinidade e temperatura são extremamente úteis, porque permitem determinar
um campo de velocidades e níveis, admitindo que a hipótese geostrófica é
válida.
A
metodologia normalmente utilizada para se obter este escoamento consiste em
considerar uma profundidade de movimento nulo (Paillet
e Mercier, 1997, Arhan et al, 1994).
Com
base na equação do vento térmico (12) e admitindo que a velocidade a uma determinada
profundidade é nula é possível obter o perfil de velocidade acima dessa mesma
profundidade.
![]() (12)
(12)
Sabendo que
a velocidade barotrópica é a média do perfil de velocidades é possível obter o
gradiente da superfície da relação geostrófica integrada na vertical. Os dados
de ventos podem ser utilizados não só como forçamento interno mas também para
definir a solução exterior, a partir da deriva de Ekman ou da solução de
Severdrup. Uma fonte de ventos para qualquer ponto do globo podem ser os
modelos atmosféricos globais, como é o caso do modelo do ECMWF (European Center for Medium-Range Weather
Forecasts - Trenberth et al., 1990).
Como solução de recurso podem ser utilizados os ventos climatológicos propostos
por Hellerman e Rosenstein (1983).
No caso da
maré podem sert utilizados os resultados do modelo global de maré FES95.2 (Le
Provost et al., 1998). Este modelo não é mais que um modelo hidrodinâmico de
elementos finitos FES94.1 (Le Provost et al., 1994) ao qual foi adicionado um
módulo de assimilação de dados. A assimilação de dados é efectuada a partir da
solução obtida do modelo empírico CSR2.0 da universidade de Texas para os
oceanos Atlântico, Índico e Pacífico. A principal razão apontada para os erros
do modelo puramente hidrodinâmico FES94.1 são o desconhecimento da batimetria
em muitas zonas do Globo.
Os
resultados do modelo FES95.2 disponíveis na internet
(ftp://spike.cst.cnes.fr/pub/techine/tide/fes95.2.1) têm uma precisão de
0.5ºx0.5º graus. Estes resultados referem-se a 26 componentes de maré para todo
o mundo. As 8 principais componentes de maré são calculadas directamente pelo
modelo hidrodinâmico: K1, O1, Q1, M2, S2, N2, K2 e 2N2 em que somente as duas
últimas não são corrigidas por assimilação de dados. As outras 18 componentes
de maré são obtidas a partir das oito principais. A qualidade dos resultados do
modelo foi aferida por comparação com a informação medida em 95 estações
espalhadas por todo o mundo.
Em
alternativa, também é possível utilizar o próprio módulo hidrodinâmico para
calcular a solução de referência recorrendo ao conceito de modelos encaixados (cf.
Figura 13). Uma vez que toda a programação do sistema Mohid
está orientada por objectos, o número de modelos encaixados que o utilizador
pode definir é ilimitado. Na realidade, esta escolha está limitada à capacidade
de cálculo disponível.
Figura 13 – Modelos encaixados aplicados ao estuário do Tejo.
Estudo efetuado no âmbito do plano de monitorização da qualidade da água das
praias da costa do Estoril.
Esta
metodologia é extremamente poderosa, podendo ser utilizada um de dois métodos
para definir a solução exterior. Um dos caminhos possíveis a seguir é definir
um modelo de larga escala com um passo espacial grosseiro, onde seja
relativamente fácil definir as condições de fronteira, e de seguida ir
implementando modelos encaixados que, na zona de estudo, tendam a reduzir o
passo da malha até se obter a precisão desejada. Esta metodologia tem como
desvantagem a exigência em termos de capacidade de cálculo. O outro caminho
consiste em recorrer a modelos encaixados para obter uma solução exterior que
não é mais do que uma simplificação das equações primitivas. Neste caso, se
pode correr em paralelo um modelo que resolva as equações primitivas e um outro
que resolva, para o mesmo domínio as equações simplificadas propostas por Roed
e Smedstad (1984), que não necessitam de condições fronteira, uma vez que
desprezam todos os termos não lineares e os gradientes perpendiculares à
fronteira. O sistema Mohid permite ao utilizador na entrada de dados anular
termos das equações e assim resolver estas numa forma simplificada.
O cálculo
do escoamento nas fronteiras por parte do módulo hidrodinâmico está dividido em
duas etapas. Numa primeira etapa as equações primitivas são resolvidas. Neste
caso a fronteira pode ser resolvida impondo a solução exterior, anteriormente
referida, ou resolvendo uma equação que permite com base nas condições internas
do módulo hidrodinâmico extrapolar o valor na fronteira (radiação) ou um misto
das duas.
As
propriedades que necessitam de condições de fronteira no módulo hidrodinâmico
são, nomeadamente: os níveis, as velocidades e os traçadores (ex: temperatura e
salinidade). Os níveis podem ser impostos (condição de fronteira activa) ou
então, caso se opte por uma condição de radiação, existem duas possibilidades :
·
Condição
de fronteira de Blumberg e Kantha (1985)
![]()
·
Condição
de fronteira de Flather (1976)
![]()
![]() – vector normal à fronteira
– vector normal à fronteira
Td – tempo de decaimento
hext, vext – nível e velocidade da
solução exterior
h, v – nível e velocidade
a calcular
A primeira
opção tem a particularidade de ser calculada no ponto de fronteira dos níveis
e, a segunda, no primeiro ponto de cálculo das velocidades. Ambas as soluções
podem ser totalmente radiativas, desde que o tempo de decaimento na primeira
seja infinito ou os valores exteriores no segundo caso sejam nulos, caso
contrário são uma solução híbrida entre uma condição de fronteira activa e
passiva.
A condição
de fronteira das velocidades não é tão importante no balanço de forças, uma vez
que só influencia os termos difusivo, advectivo e de Coriólis, que são termos de
inércia, mas pode ser relevante em termos de estabilidade. Neste caso nos
pontos fronteira é resolvida uma equação simples de radiação (Palma e Matano,
1998 e Palma e Matano, 2000):
![]()
sendo c
a celeridade a que se propagam as perturbações.
Se c
= 0 esta condição se torna numa condição de valor imposto. Se c = + ¥ então estamos perante uma condição de
gradiente nulo.
O valor
real de c é difícil de determinar porque as perturbações na
componente barotrópica da velocidade se propagam a ![]() enquanto as da componente baroclínica propagam-se a uma velocidade
2 ordens de grandeza inferior (velocidade de propagação das ondas internas),
usualmente assumido como sendo
enquanto as da componente baroclínica propagam-se a uma velocidade
2 ordens de grandeza inferior (velocidade de propagação das ondas internas),
usualmente assumido como sendo ![]() mas ao qual está
associada uma grande incerteza. A solução é dividir na fronteira as velocidades
em duas componentes aplicar a equação anterior a cada uma delas e voltar a
somá-las.
mas ao qual está
associada uma grande incerteza. A solução é dividir na fronteira as velocidades
em duas componentes aplicar a equação anterior a cada uma delas e voltar a
somá-las.
Para o caso
dos traçadores é resolvida uma equação de advecção que pode ou não ser
corrigida com uma velocidade radiativa (Stevens 1991). Esta equação é
semelhante à proposta por Blumberg e Kantha (1985) para os níveis:
![]()
Neste caso
o valor de c é igual ao da componente baroclínica das
velocidades, na medida em que ambos sofrem a influência da propagação de ondas
internas.
A segunda
etapa do cálculo dos valores na fronteira, pode ou não ser accionada pelo
utilizador e consiste em, após a resolução das equações, relaxar qualquer ponto
de cálculo para a solução exterior com o objectivo de não deixar a solução
simulada divergir devido a pequenas inconsistências entre a solução de
referência e as equações do módulo hidrodinâmico (13). Neste caso é resolvida a seguinte equação:
Neste caso
P é uma propriedade genérica que pode ser o nível, uma velocidade ou um
traçador, P* é a propriedade calculada recorrendo às equações
primitivas enquanto Pext é o valor da propriedade da solução
exterior e a o seu peso relativo. A condição de fronteira
FRS (Flow Relaxation Scheme) proposta por Martinsen e Engedahl (1987)
não é mais que aplicar esta metodologia numa faixa de dez células ao longo da
fronteira admitindo que o coeficiente a tem o valor de um na fronteira e
tende para zero conforme se afaste desta.
2.6.2
Fronteiras
fechadas
Fisicamente existem trocas de quantidade de
movimento entre a costa e o escoamento por atrito lateral. Todavia este
processo é desprezável relativamente ao atrito no fundo, devido à diferença
existente entre o passo espacial na horizontal e na vertical. O seu efeito do
atrito lateral sobre o escoamento só será visível no escoamento para passos de
malha inferior a 10 m. Nestes casos o utilizador tem que escolher a opção de
não escorregamento lateral.
Como foi
anteriormente referido, a fronteira móvel é uma fronteira fechada cuja posição
evolui no tempo. Este tipo de fronteira é utilizada para simular zonas
intertidais. Neste caso é necessário fazer uma verificação constante de todos
os pontos de cálculo de velocidades que estão descobertos onde é imposta a
condição de fluxo de massa e fluxo de quantidade de movimento nulos. Um ponto
de cálculo das velocidades se considera descoberto se uma das seguintes
condições ocorrer:
![]() e
e ![]()
![]() e
e ![]()
Figura 14– Condições para um ponto de cálculo de velocidades
se considerar descoberto.
HMIN é a altura de coluna
de água mínima, abaixo do qual se considera que um ponto de cálculo de níveis
já não tem água. Este valor tem que ser suficientemente grande de modo a
minimizar a criação artificial de massa mas, por outro lado, se for demasiado
grande pode introduzir erros na propagação da maré nas zonas intertidais.
O ruído provocado pelas variações bruscas de velocidade nas fases de
cobertura ou descobertura deve ser controlado através de uma escolha criteriosa
de HMIN (Leendertse, 1970, Stelling, 1983). O valor normalmente utilizado é na ordem dos
4 cm. As outras variáveis são Hij profundidade total (ou altura da
coluna de água), hij profundidade (ou cota a que se encontra o
fundo) e hij nível
(ou cota a que se encontra a superfície livre utilizando um referencial
simétrico ao das profundidades).
3
Módulo
de Transporte Lagrangeano
Os
primeiros modelos de transporte lagrangeanos de que se podem encontrar
referências na bibliografia utilizavam o conceito de traçador única e
exclusivamente para seguir a respectiva trajectória e, deste modo, perceber de
uma forma intuitiva os mecanismos de transporte.
Nestes
modelos as propriedades básicas de cada traçador eram apenas a origem e a
posição espacial. Posteriormente surgiram versões mais sofisticadas, que tinham
como principal objectivo o estudo do impacte em ecossistemas aquáticos de
emissões pontuais antropogénicas. Nestes modelos já aparecem associadas aos
traçadores novas características que incluem propriedades indicadoras da
qualidade da água (ex: coliformes, petróleo, temperatura e fitoplâncton),
geometria, velocidade de sedimentação e propriedades turbulentas do escoamento.
No início
dos anos 80 esta nova geração de modelos lagrangeanos tornou-se numa ferramenta
comum de gestão ambiental. Nesta fase eram utilizados, principalmente, para
estudar a dispersão de plumas térmicas de usinas termo eléctricas e plumas de
emissários (Bork e Maier-Reimer, 1978, Chin, 1985,
Monteiro et. al, 1992, Monteiro e
Neves, 1992, Neves e Martins, 1996). Estes casos são caracterizados por
gradientes acentuados e pelas plumas terem, usualmente, uma dimensão muito
inferior à área que é simulada. Neste tipo de aplicações, a aproximação
lagrangeana constitui uma boa solução, pois permite manter gradientes elevados
uma vez que esta metodologia não possui os problemas de difusão numérica que
caracteriza os modelos eulerianos.
O
aumento exponencial da capacidade de cálculo dos computadores que se tem
verificado nos últimos anos veio permitir que os modelos de traçadores
lagrangeanos venham a ser utilizados para simular processos cada vez mais
complexos, nomeadamente: o transporte de sedimentos Kelsey et. al, (1994), a
dispersão de petróleo Shiau (1991), Mansur e Price (1992), produção primária
Woods and Onken (1982), Dippner (1993), Rodrigues et. al (1996), Rodrigues and Neves, (1996)
O
modelo lagrangeano tridimensional, aqui apresentado, foi inicialmente
desenvolvido para ser acoplado à primeira versão do modelo hidrodinâmico Mohid
(Neves, 1985) que era um modelo bidimensional. Numa segunda fase foram sendo
adicionadas novas potencialidades permitindo a simulação de processos tais como
descargas de águas residuais, emissão pontual de sedimentos (ex: rios e
material dragado), trajectórias de manchas de petróleo e cálculo de tempos de
residência.
Numa
terceira fase o modelo foi generalizado para ser facilmente acoplado tanto a
modelos 2D como 3D (Leitão, 1997). Neste modelo, os traçadores (ou partículas) possuem seis características
principais: coordenadas espaciais (x, y, z), velocidade horizontal/vertical,
tempo durante o qual o traçador mantém a velocidade, velocidade de
sedimentação, massa e volume. Para cada umas destas propriedades é resolvida
uma equação de evolução. A massa pode ser um array de mais de 30 propriedades (ex: nutrientes, fitoplancton,
matéria em suspensão).
3.1
Deslocamento
dos traçadores
As
coordenadas espaciais são calculadas a partir da definição de velocidade:
![]()
A qual é
resolvida com base num um método explícito simples:
![]()
A aplicação
de métodos de ordem mais elevada, implica a utilização de procedimentos
iterativos. O método de Heun
utilizado por Monteiro (1995) corresponde a um esquema de previsão-correcção de
dois níveis temporais, com um grau de precisão de 2 a ordem
no tempo. Costa (1991) concluiu que a adopção de esquemas de ordem mais elevada
só é necessária quando as linhas de corrente apresentam uma curvatura acentuada
e o passo temporal é elevado. Para a maioria dos escoamentos naturais, a
precisão, associada ao método explícito, é suficiente para se obterem bons
resultados.
Para
calcular a velocidade em qualquer ponto do domínio, é utilizada uma
interpolação linear (cf. Figura 15), também neste caso se poderia optar por um
método de interpolação mais preciso, como a interpolação bilinear utilizada por
Monteiro (1995), embora este aumento de precisão torne o algoritmo mais lento.

![]()
Figura 15- Cálculo
da velocidade média dos traçadores.
Ás
velocidades Ux e Ux+dx, segundo x, nas faces 1 e 2 podem ainda ser adicionadas uma velocidade
de deriva devido ao vento e uma velocidade representativa do transporte
difusivo.
3.1.1
Termo
difusivo
O
transporte turbulento é forçado pelos vórtices não resolvidos pelo modelo. O
efeito destes vórtices, sobre os traçadores, depende da razão entre o tamanho
dos vórtices e dos traçadores. Os vórtices maiores que os traçadores induzem um
movimento aleatório ao traçador, como está esquematizado na Figura 16. Vórtices mais pequenos que os traçadores originam
entrada de matéria para dentro do traçador, aumentando o seu volume e a sua
massa de acordo com a concentração do meio envolvente (Figura 17).
3.1.2
Deslocamento
aleatório
O movimento
aleatório é calculado recorrendo ao procedimento adoptado por Sullivan, 1971, e
por Allen, 1982. Este movimento é calculado utilizando o comprimento de mistura
e o desvio padrão da velocidade turbulenta, obtidos a partir do fecho
turbulento adoptado no modelo hidrodinâmico. Os traçadores mantêm a velocidade
aleatória ou turbulenta durante o tempo necessário para percorrer o comprimento
de mistura.
Figura 16- Movimento
aleatório forçado por vórtices maiores que o traçador (círculo cinzento).
O método utilizado para calcular o deslocamento
aleatório dos traçadores admite Ds igual ao comprimento de mistura e Dt igual ao tempo que o traçador demora a
percorrer Ds. Nestas condições, a velocidade aleatória
passa a ser u’=Ds/Dt. Para ser consistente, a
metodologia random walk deve permitir
que os traçadores mantenham a sua velocidade aleatória durante o período
anteriormente referido que, em condições normais, é diferente do passo temporal
do modelo hidrodinâmico.
Allen (1982) calcula a dispersão de uma pluma,
impondo um movimento aleatório, igual em módulo ao comprimento de mistura e com
igual probabilidade de ser positivo ou negativo. O tempo, durante o qual um
traçador faz um salto aleatório, é igual ao comprimento de mistura a dividir
pelo desvio padrão da velocidade turbulenta, ![]() . A velocidade
aleatória é imposta como função das condições locais de turbulência. O modelo
de traçadores admite turbulência isotrópica no plano horizontal, mas na
vertical a dispersão anisotrópica é simulada explicitamente.
. A velocidade
aleatória é imposta como função das condições locais de turbulência. O modelo
de traçadores admite turbulência isotrópica no plano horizontal, mas na
vertical a dispersão anisotrópica é simulada explicitamente.
Na horizontal o comprimento de mistura é
independente da direcção que o traçador toma no processo aleatório, mas na
vertical o valor do comprimento mistura depende da trajectória aleatória
ascendente ou descendente do traçador. Desta forma é possível simular o efeito
da estratificação na mistura vertical e simular com modelos deste tipo,
acoplados a modelos de turbulência, a produção primária em oceano aberto
(Miranda et al., 1999).
A abordagem
que utiliza o conceito de comprimento de mistura e de desvio padrão da
velocidade turbulenta visa simular a trajectória turbulenta dos traçadores de
uma forma fisicamente realista. Se se considerar um meio onde o fluxo de massa
segundo x é apenas forçado pela turbulência e se emitir um conjunto de
traçadores num ponto x=0, a taxa de dispersão destes pode ser escrita na forma
(Tennekes, 1972):
![]()
A taxa de
dispersão não é mais que a taxa a que a variância da variável estatística,
distância à origem, varia no tempo. A correlação entre x e u’ de um traçador em
movimento é muito baixa para lá do comprimento de mistura, isto é, ![]() para x>L . Assim
sendo, o valor de
para x>L . Assim
sendo, o valor de ![]() pode ser estimado
como sendo da ordem de uTL, em que
pode ser estimado
como sendo da ordem de uTL, em que ![]() é a raiz quadrada da
variância da velocidade turbulenta segundo x e L o comprimento de mistura.
é a raiz quadrada da
variância da velocidade turbulenta segundo x e L o comprimento de mistura.
Na
metodologia random walk o comprimento
de mistura (L) não é mais que a distância que o traçador tem que percorrer para
“esquecer” a sua velocidade aleatória (ou turbulenta) inicial u’, que é
reinicializada recorrendo a uma distribuição estatística de média nula e
variância uT2,
sempre que o traçador percorre a distância L. Num meio isotrópico L tem
um valor constante mas, para meios estratificados e junto de fronteiras
sólidas, este valor é variável.
Nesta
metodologia, o intervalo de tempo que separa dois deslocamentos aleatórios não
é uma constante especificada pelo utilizador, mas também uma variável aleatória
uma vez que Dt=L/uT , o que pode levantar
problemas de ordem prática, especialmente para escoamentos com comprimento de
mistura fortemente variável. Em zonas onde L é muito pequeno (por exemplo junto
a uma fronteira sólida) Dt é igualmente pequeno tornando o
algoritmo demasiado lento. Por vezes, com o objectivo de aumentar a eficiência
do algoritmo, é admitido que L e uT
tomam valores constantes em todo o domínio o que indirectamente
equivale a admitir Dt constante, uma vez que Dt=L/uT.
3.1.3
Aumento
do volume
Um aspecto
que normalmente não é considerado nos modelos lagrangeanos é o transporte
difusivo forçado por vórtices de menor dimensão que os próprios traçadores (cf.
Figura 17).

Figura 17- Aumento do volume por vórtices mais pequenos que o
traçador (círculo cinzento).
Este efeito
pode ser simulado na forma de um aumento de volume do traçador, só fazendo no
entanto sentido quantificá-lo, caso as dimensões do traçador sejam uma das
propriedade simuladas.
Ozmidov
postulou a hipótese de fornecimento de energia quase discreto ao oceano. De
acordo com esta teoria, a injecção de energia no oceano, por fontes externas,
está concentrada na vizinhança de três
escalas características do escoamento: escala da circulação geral,
escala das oscilações inerciais, escala da maré (~10 Km) e escala das ondas
induzidas pelo vento (~10m). Um dos principais resultados deste postulado
consiste em poder admitir-se que entre os pontos de injecção de energia, o
coeficiente de difusão turbulento horizontal pode ser descrito pela “lei dos
4/3 de Kolmogorov”. Este resultado foi confirmado por diversos trabalhos
experimentais, que mediram a dependência do coeficiente de difusão horizontal
da escala característica (Ozmidov, 1990)
Considerando
L como uma dimensão característica
dum traçador, para condições de isotropia local, o coeficiente de difusão pode
ser descrito pela expressão K=aLb. Pelo postulado de Ozmidov, a é uma constante proporcional à raiz
cúbica da taxa de dissipação da energia cinética turbulenta, b é uma constante que, para condições
de isotropia, é igual a 4/3 ( lei dos 4/3 de Kolmogorov).
Para
condições de isotropia, aplicando a lei de Kolmogorov à solução analítica da
equação diferencial de difusão tridimensional, correspondente a uma emissão
pontual na origem xi=0,
se pode escrever (Fischer, 1979)
Considerando
D como o diâmetro onde se concentra aproximadamente 95% da massa do traçador
então ![]() .
.
Caso se
entenda igualmente D como a dimensão característica do traçador, L»D, então se pode dizer que o respectivo volume
é VµL3µt3/(2-b). Em conclusão, para condições de isotropia, a taxa
de variação do volume pode ser descrita como sendo ![]() .
.
Por razões
de simplicidade e tendo em conta a elevada incerteza associada ao valor de b se assumiu
que este vale 2 e portanto:
![]()
Tvol200
- é uma constante e corresponde ao tempo que um traçador demora a
duplicar de volume (parâmetro de calibração)
Esta
equação é resolvida recorrendo a uma discretização explícita, a qual é mais
estável que a implícita pois Kvol é sempre positivo.
![]()
O
utilizador pode ainda especificar um volume máximo a partir do qual o traçador
é eliminado, isto é, um valor a partir do qual se considera que a concentração
dentro do traçador é aproximadamente igual à concentração no meio não
perturbado.
3.2
Fontes
e Poços
O modelo
lagrangeano visa, essencialmente, resolver o transporte advectivo e o
transporte difusivo. Os termos fontes-poços são resolvidos por módulos
separados, dos quais se destacam o módulo ecológico, que simula a dinâmica em
cada traçador do zooplancton (consumo primário), do fitoplâncton (produção
primária) e dos nutrientes (Rodrigues e Neves, 1996) e o módulo de
hidrocarbonetos que simula as alterações das propriedades físico-químicas e o
espalhamento por dispersão mecânica de manchas de hidrocarbonetos (Silva,
1997).
3.2.1
Inactivação
bacteriológica
Nos modelos
de qualidade da água, utilizados em Engenharia é frequente utilizar reacções de
primeira ordem. É o caso da inactivação bacteriológica e a sedimentação e
ressuspensão de sedimentos.
Apesar da
estrutura simplista destes algoritmos, eles são uma ferramenta muito útil e
versátil numa primeira abordagem a problemas de qualidade da água e de
dispersão de sedimentos contaminados.
As águas
residuais contêm uma grande variedade de microorganismos, alguns dos quais
patogénicos cuja determinação directa requer complexas análises
microbiológicas. Com o objectivo de facilitar a verificação da qualidade da
água e de permitir assim implementar esquemas de análise de água que permitam
monitorizar extensas áreas (ex: praias, barragens, rios), utilizam-se
indicadores biológicos de fáceis medição, que permitem estimar indirectamente o
grau de contaminação da água. A maioria das normas, estabelecidas pelas
autoridades sanitárias e pelos organismos responsáveis pela qualidade da água
dos meios receptores, referem-se a níveis máximos e aconselhados de
concentração de indicadores biológicos. Os coliformes totais e fecais são os
principais indicadores utilizados.
Na
simulação da inactivação, admite-se, normalmente, que este segue uma reacção de
primeira ordem:
![]()
KB
- taxa de inactivação;
T90
- tempo necessário para que a
concentração de bactérias seja reduzida em 90%;
C -
concentração de bactérias.
Em primeira
aproximação, se pode admitir que T90 é um valor constante e da ordem
das 4 horas. Caso se pretenda simular, com precisão, este processo, é
necessário utilizar valores de T90 que tenham em conta a
variabilidade da radiação solar ao longo do dia.
3.2.2
Sedimentação/Ressuspensão
De modo a
ser possível simular o processo de
sedimentação a cada traçador se associou uma velocidade de queda que pode ser
dada directamente ou calculada a partir dum diâmetro característico, d,
recorrendo às equações que calculam a velocidade de queda, ws, de
partículas não-esféricas propostas por Rijn (1989).
O traçador,
ao chegar ao fundo, sedimenta somente se a tensão de corte do escoamento for
inferior a uma tensão crítica de sedimentação, tsedimentação, que é especificada pelo
utilizador.
Por outro
lado, se a tensão do escoamento for superior a uma tensão crítica de erosão (ou
ressuspensão) , terosão>tsedimentação, os traçadores, até então
sedimentados, voltam a ser recolocados na coluna de água. Uma vez que o processo
de ressuspensão é extremamente complexo, no caso dos estuários os sedimentos
podem ser ressuspendidos alguns centímetros ou alguns metros, se optou por um
critério de recolocar os traçadores aleatoriamente na coluna de água, no caso
de haver condições de ressuspensão. O algoritmo simplificado, que simula o
processo de ressuspensão, só pode ser aplicado a águas pouco profundas e bem
misturadas.
3.2.3
Qualidade
da Água
Os
processos de qualidade da água (ou pelágicos) são simulados recorrendo a
formulação proposta pela EPA (1985). Esta formulação foi implementada por
Miranda (1999) no sistema Mohid, tendo por base a tese de mestrado de
Rodrigues (1997) e de doutoramento de Portela (1996).
Os
processos de qualidade da água são contabilizados na forma de termos de fonte e poço associados ao ciclo de carbono,
fósforo e azoto. As propriedades que são alteradas por estes processos são
designadamente o fitoplâncton, o zooplâncton, o CBO, o oxigénio, a amónia, o
nitrato, o nitrito, o azoto orgânico particulado e o azoto orgânico dissolvido
refractário e não-refractário, o fósforo orgânico e inorgânico.
3.3
Hidrocarbonetos
3.3.1
Introdução
A primeira
versão de modelação numérica de hidrocarbonetos incluída no sistema MOHID foi
feita no âmbito de uma tese de Mestrado (Silva, 1997). Este trabalho tinha como
base os processos de espalhamento desenvolvido para o modelo MU-SLICK
(Management Unit of the Mathematical Model of the North Sea and Scheldt
Estuary) e os módulos de hidrodinâmica e transporte do sistema MOHID. A revisão
completa do estado de arte referente as derrames de hidrocarbonetos, tal como a
implantação da descrição matemática do transporte, do espalhamento natural e do
envelhecimento dos hidrocarbonetos foram efectuados no âmbito daquela tese.
O módulo do
sistema Mohid que resultou deste trabalho foi designado OilSpill.
Uma segunda tese de mestrado efetuada com base no sistema Mohid (Costa,
1999) contém comparação entre vários modelos de análise e uma validação do
modelo por comparação com dois acidentes ocorridos frente a costa portuguesa.
Atualmente,
a simulação dos hidrocarbonetos com o sistema Mohid, é feita recorrendo
ao modelo lagrangeano descrito nas seções anteriores deste capítulo. O módulo
está adaptado para prever o comportamento de manchas em zonas costeiras
simulando o espalhamento, as alterações das propriedades do óleo e diversos
processos de envelhecimento, permitindo ainda o recurso a formulações
alternativas opcionais.
Assim, o módulo
tem em conta a evaporação (através da aproximação a pseudo-componentes –Yang
& Wang 1977 e Payne et al. 1984), dispersão na coluna de água (podem
ser utilizadas duas formulações diferentes – Delvigne & Sweeney 1988 e
Mackay et al. 1980), emulsificação (opção entre as formulações de Rasmussen 1985 e Mackay et al. 1980)
e dissolução (utilizando um método proposto por Cohen et al. 1980 e
posteriormente actualizado por Huang & Monastero 1982).
São
igualmente consideradas as alterações nas propriedades do óleo, nomeadamente no
que se refere à densidade, que recorre à formulação utilizada pelo modelo ADIOS
(NOAA 1994), e à viscosidade em que o algoritmo resulta da combinação das
equações de Mooney 1951 e Mackay et al. 1980).
Nas secções
seguintes são descritos os processos mais importantes ligados à deriva e
destino final de manchas de hidrocarbonetos.
3.3.2
Espalhamento
Pode definir-se o espalhamento natural do óleo
como o aumento da área da mancha devido à tendência que o óleo tem para se
espalhar em água parada. Esta tendência é explicada pelas forças gravítica e
tensão superficial, e contrariada pelo efeito inercial e viscosidade
interfacial (óleo-água). Fay (1969)
analisou este balanço de forças, assumindo que a mancha é circular e que a
espessura do óleo na mancha é homogénea.
Nos
primeiros minutos após o derrame, o espalhamento é, provavelmente, o processo
predominante. Após algum tempo, e mediante a existência de vento forte, mar
agitado e efeito das correntes, a mancha pode ser deformada, fragmentada e dispersa.
Nestas condições, a aproximação de Fay torna-se inaplicável. Contudo, numa fase
inicial do derrame, o cálculo da área da mancha pode ser estimado pela teoria
de Fay ou outra teoria modificada, até porque a área é um parâmetro importante
não só para o desenvolvimento de estratégias de defesa e contenção da mancha,
mas também porque alguns processos de envelhecimento (como a evaporação, por
exemplo) dependem directamente da área superficial ocupada.
Assim,
segundo Fay, o espalhamento pode ser dividido em três fases, cada uma delas
dominada por duas forças. Imediatamente após o derrame, o espalhamento é
comandado pelas forças gravíticas – trata-se da fase gravítica-inércia. Após um
período de tempo curto segue-se a fase gravítica-viscosa, em que a força gravítica
é balanceada pela viscosidade interfacial óleo-água. Quando a espessura da
mancha é muito pequena, a força gravítica deixa de ser importante, sendo o
espalhamento dominado pelas forças de tensão superficial, e contrariado pela
viscosidade interfacial – esta é a fase tensão superficial-viscosa.
A equação de Fay que descreve o balanço das
forças acima mencionado é a seguinte:
![]()
onde:
R - raio da
mancha assumindo um espalhamento axissimétrico
rw- densidade da água
ro- densidade do óleo
s- tensão interfacial oleo-água
g-
aceleração da gravidade
t- tempo
após o derrame
nw- viscosidade cinemática da água
h- espessura
da mancha
a1, a2 e a3 são constantes empíricas adimensionais, que
podem ser estimadas como sendo a1=0.42, a2=1.64, a3=0.86, segundo Stolzenbach (1977).
As soluções
dessa mesma equação para as três fases assumem as seguintes formas, com todas
as unidades no Sistema Internacional:
|
Fase de espalhamento |
L |
R |
D |
|
Gravítica-inércia |
|
|
|
|
Gravítica-viscosa |
|
|
|
|
Tensão
superficial-viscosa |
|
|
|


L -
comprimento característico da mancha para um espalhamento unidimensional
D - o coeficiente de difusão, muitas
vezes utilizado para cálculo do espalhamento com base em modelos trajectórias
de partículas Lagrangeanas.
D = (rw-ro)/rw
V- volume do óleo derramado
A = 0.5V / unidade de comprimento da mancha
k1,
k2 e k3 assumem diferentes valores por diferentes
autores. Os valores recomendados (Flores et al, 1998) são,
respectivamente, 0.57, 0.725 e 0.5.
Uma vez que
a fase inicial é muito curta, muitas vezes não chega sequer a ser modelada
directamente, sendo hábito calcular a área (A0) e o tempo (t0)
em que esta fase termina, iniciando-se a fase gravítica-viscosa:
A área no final
da primeira fase é, assim, muitas vezes assumida como a área inicial da mancha.
Para além
disso, a terceira fase é também frequentemente inaplicável, uma vez que esta
fase só se inicia quando a mancha já é muito fina, resultando muitas vezes numa
divisão em pequenas manchas devido aos efeitos do vento e vagas. Desta forma,
os pressupostos de Fay não são satisfeitos, visto que a mancha deixa de ser
única.
Portanto, é
comum utilizar apenas a fase gravítica-viscosa para calcular o espalhamento,
assumindo que quando a espessura da mancha decresce até um determinado valor, o
espalhamento termina. Mackay et
al. (1980) recomendou um valor de 0.1 mm,
valor este que foi utilizado no modelo ADIOS da NOAA (1994). No modelo de Reed
(1989) esse mesmo valor é utilizado para crudes pesados, enquanto que para as
substâncias menos viscosas assume-se o valor de 0.01 mm.
Uma vez que
as fórmulas de Fay subestimam a taxa de espalhamento para a fase
gravítica-viscosa (pois não consideram o efeito do vento e a turbulência associada),
surgiram algumas correcções empíricas. Lehr et al. (1984)
propôs a seguinte formulação modificada de Fay:
![]()
em que W
é a velocidade do vento em nós, V é o volume em barris, t é o
tempo em minutos e As é a área da mancha em m2.
Outra
formulação modificada de Fay para o espalhamento na fase gravítica-viscosa foi
proposta por Mackay et al.(1980) e utilizada em diversos modelos:
![]()
sendo KM
uma constante empírica com um valor de 150 s-1.
3.3.3
Evaporação
O processo
da evaporação é um processo bastante importante, que ocorre desde o início do
derrame. Quando o óleo é derramado, os componentes que possuem ponto de
ebulição mais baixo (mais voláteis) são rapidamente volatilizados, reduzindo
assim o volume e a massa da mancha que permanece na água. Durante as primeiras
24 horas após o derrame, a maior parte dos óleos-crude perdem aproximadamente
25-30% dos seus componentes mais leves.
Os derrames de hidrocarbonetos mais leves podem ter o seu volume reduzido em
40% em poucas horas, apenas devido à evaporação (Costa, 1999). A evaporação
destes componentes mais voláteis aumenta a densidade e viscosidade da mancha de
óleo, podendo os compostos mais pesados continuar a sofrer outros processos de
envelhecimento. A evaporação é, portanto, o primeiro processo envolvido na
remoção de óleo da superfície da água. À medida que o óleo continua a
envelhecer, e especialmente se se formarem emulsões água-no-óleo, a evaporação
vai diminuindo progressivamente.
A taxa e
extensão da evaporação dependem de diversos factores, tais como as fracções com
baixo ponto de ebulição, área superficial e espessura da mancha, pressões de
vapor do óleo e coeficiente de transferência de massa, que por seu turno são
funções da composição do óleo, velocidade do vento, estado do mar e temperatura
do ar e da água.
Diferentes
algoritmos podem ser utilizados para o cálculo da taxa de evaporação. Entre os
mais conhecidos encontram-se o modelo de pseudo-componentes (Yang &
Wang, 1977 e Payne et al., 1984) e o modelo analítico, também conhecido
como o modelo de exposição evaporativa (Stiver & Mackay, 1984).
A
aproximação de pseudo-componentes assume que os óleos-crude e os produtos
refinados são constituídos por uma mistura de componentes discretos
independentes, designados por pseudo-componentes, em que cada um deles é
tratado como sendo uma substância singular com uma pressão de vapor associada.
Os pseudo-componentes e o respectivo ponto de ebulição são geralmente
determinados com base no método da destilação.
A taxa de
evaporação volumétrica para cada pseudo-componente i pode ser calculada
pela seguinte equação:
![]()
Em que Vei
é o volume evaporado da fracção i, t é o tempo, Kei
é o coeficiente de transferência de massa, Pisat
é a pressão de vapor da fracção considerada, R é a constante universal
dos gases perfeitos, T é a temperatura do óleo, ![]() é o volume
molar relativo da fracção i, As é a área da
mancha e ci é a fracção molar do componente i. Por
vezes, é utilizada alternativamente a fracção em volume.
é o volume
molar relativo da fracção i, As é a área da
mancha e ci é a fracção molar do componente i. Por
vezes, é utilizada alternativamente a fracção em volume.
O volume
molar relativo de cada pseudo-componente é encontrado a partir de uma
correlação entre o volume molar e o ponto de ebulição para uma série de alcanos
(C3-C20):
![]()
A pressão
de vapor saturado de cada pseudo-componente pode ser determinada com base na
equação de Antoine:

em que P0
é a pressão atmosférica, DSi é a variação na entropia resultante
da vaporização da fracção i, DZ é o factor de compressibilidade (assume-se que
DZ = 0,97), BPi é o ponto de ebulição do componente i,
e C2,i é um coeficiente empírico. Assim,
![]()
![]()
O
coeficiente de transferência de massa pode assumir diferentes formulações.
Segundo Mackay e Matsugu (1973):
em que
nesta equação W é a velocidade do vento em m.h-1, Ds
é o diâmetro da mancha (m), Sci é o número de Schmidt para a
fracção i (adimensional) e Mi é a massa molecular de cada
fracção (Kg.m3). As unidades de Kei
são, portanto, em m.h-1
Mais tarde
Buchanan e Hurford (1988) propuseram uma formulação mais simples:
![]()
O valor de
2.5x10-3 não é consensual em toda a literatura, podendo variar entre
1.5 x10-3 e 5.0 x10-3.
O método da
exposição evaporativa pode ser expresso por:
![]()
A e B são constantes
empíricas, To é o ponto de ebulição inicial e TG
é o gradiente da curva de destilação. Todas estas propriedades dependem do tipo
de óleo. Caso estes valores sejam desconhecidos, poderão ser aproximados, sendo
To e TG estimados com base na
densidade API, de acordo com a versão 1.1 do modelo ADIOS (NOAA 1994):
A =
6.3 B = 10.3
Para
óleos-crude:
![]() e
e ![]()
Para
produtos refinados:
![]() e
e
![]()
O método
dos pseudo-componentes fornece resultados bastante razoáveis, no entanto requer
maior informação sobre o óleo. Para além disso, o facto das fracções serem determinadas
com base na temperatura de destilação poderá conduzir a alguns desvios à
realidade, uma vez que compostos diferentes podem possuir a mesma temperatura
de ebulição, como por exemplo alcanos, naftenos e aromáticos.
Quanto ao
método da exposição evaporativa, este não requer informação sobre a composição
do óleo. Contudo, os resultados obtidos só são válidos para as primeiras 8
horas após o derrame, uma vez que após este período o método fornece valores
demasiado elevados.
Neste
momento, o cálculo da evaporação no sistema MOHID é efectuado recorrendo ao
modelo dos pseudo-componentes
3.3.4
Dispersão
A dispersão
vertical é um processo físico em que as gotículas de óleo são transportadas a
partir da superfície do mar para a coluna de água, sobretudo devido à
rebentação das ondas. Essas gotículas podem ter dimensões variáveis, sendo que
as mais pequenas não voltam à superfície devido à turbulência natural da água,
difundindo-se na coluna de água.
Este processo
é influenciado por três factores essenciais: viscosidade do óleo, temperaturas
da água e do ar e estado do mar.
Quanto
maior for a viscosidade do produto, maior é a possibilidade de se formarem
espessas camadas de óleo na superfície da água, e assim diminuir a dispersão do
mesmo na água, ao contrário dos hidrocarbonetos menos viscosos que facilmente
se podem dispersar completamente ao fim de alguns dias.
As
temperaturas da água e do ar também podem inibir a dispersão, caso sejam
inferiores ao ponto de fluidez.
O estado do
mar é associado à energia da rebentação das ondas. Assim, em derrames de óleo
durante tempestades, a dispersão poderá ser o principal mecanismo de remoção de
óleo da superfície, enquanto que em condições meteorológicas normais a evaporação
será mais significativa, apesar da dispersão poder continuar a ter alguma
relevância.
Estudos
mais recentes demonstraram que a presença de quantidades significativas de
asfaltenos retardam o processo de dispersão do óleo (Fingas et al., 1993).
Delvigne e
Sweeney (1988) desenvolveram uma série de estudos laboratoriais acerca da
dispersão natural do óleo. Com base nos resultados experimentais obtidos,
desenvolveram uma relação empírica para a taxa de dispersão do óleo para a
coluna de água devida à rebentação das ondas:
![]()
em que:
d0
é o diâmetro das
partículas,
Dd é o intervalo de diâmetros das partículas,
coil
é um
parâmetro determinado experimentalmente, e que depende do tipo de óleo,
Dba é a energia de dissipação das ondas
por unidade de área superficial, que pode ser calculada da seguinte forma:
![]()
Hrms, é determinada por:
![]()
sendo H0
a altura da onda.
Fwc
é a fracção de superfície de mar atingida pela rebentação das ondas por unidade
de tempo, dada por:
![]()
onde Cb
=0,032 s.m-1 e Wi é a velocidade do vento
para iniciar o rompimento (5 m.s-1). Tw é
o período da onda.
Caso a
altura e período de onda não sejam conhecidos, estes poderão ser determinados
empiricamente, com base na velocidade do vento, de acordo com a formulação
utilizada no modelo ADIOS (NOAA 1994):
![]() e
e
![]()
Uma vez que
a energia turbulenta é de difícil determinação, existem outros algoritmos simplificados
que parametrizam o processo de dispersão em função do quadrado da velocidade do
vento. Entre eles, encontra-se a formulação utilizada por Mackay et al.
(1973):
![]()
Esta
formulação determina a taxa de transferência de massa por hora, em que moil
é a massa de óleo que permanece à superfície, m é a viscosidade dinâmica do óleo
(cP), h é a espessura da mancha (cm) e, W é a velocidade do vento
(m.s1) e s é a tensão interfacial óleo-água
(dyne.cm-1).
No sistema
MOHID, os algoritmos programados permitem a previsão da dispersão através das
duas formulações referidas anteriormente, consoante a opção do utilizador.
3.4
Emissão dos traçadores
No que
concerne ao tempo, a emissão dos traçadores pode ser dividida em duas grandes
classes instantânea ou contínua. Na primeira é apenas necessário definir a
localização e a massa emitida, enquanto na segunda, em vez de massa é
necessário definir uma vazão mássica que pode ser constante ou variável. Se o
utilizador optar por uma vazão variável é necessário definir uma série temporal
que indique a sua variação em função da data.
Quanto à
localização pode-se dividir em pontual, por caixas e acidente. No caso da
emissão pontual é apenas necessário definir as coordenadas geográficas da
emissão, enquanto na emissão por caixas o utilizador tem que definir um
polígono onde é efetuada a emissão (Figura 18).
No caso da
emissão que se designou de acidente é também dada a localização geográfica,
mais o volume emitido e a espessura inicial. Neste caso, o modelo distribui, de
uma forma circular as partículas em torno da localização pontual definida.
Estes são
tipos de emissão principais, mas podem ser efectuadas emissões híbridas. Por
exemplo, para simular uma derrame de um petroleiro de uma forma realista é
possível fazer uma emissão que, no instante inicial, é do tipo do acidente no
espaço e instantânea no tempo (rombo instantâneo do casco do navio) se
considerando que, após o derrame inicial, a emissão é feita pontualmente no
espaço em contínuo no tempo (derrame lento de crude ainda armazenado nos
tanques do navio).
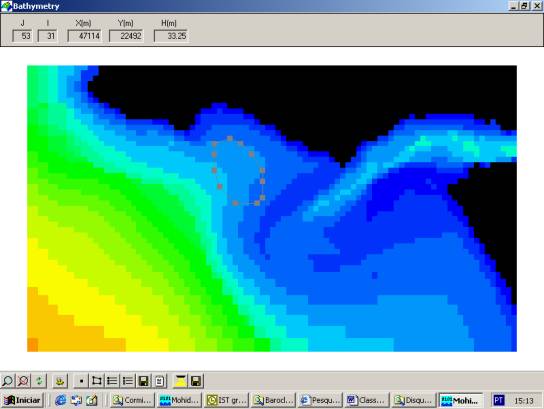
Figura 18 – Definição dos limites de um derrame, emissão por
caixas.
3.5
Condições
de Fronteira
Neste
modelo são considerados dois tipos de fronteira: fronteiras com água e com
terra. Para as fronteiras com água é adoptado o critério de eliminação do
traçador, caso este saia do domínio. Se o traçador for arrastado para um ponto
de terra, o utilizador pode optar na entrada de dados, por recolocar o traçador
na sua posição imediatamente anterior ou admitir que o traçador fica retido na
totalidade ou parcialmente na linha de costa. O utilizador pode ainda optar por
considerar que uma destas opções é tomada pelo modelo função do tipo de costa.
No caso dos hidrocarbonetos a primeira opção é normalmente adoptada em costas
rochosas e a segunda em costas de areia.
4
Interface
Gráfica do modelo Mohid
O modelo Mohid
tem uma interface gráfica que permite ao utilizador gerir os dados de entrada
do modelo, executar o programa e analisar os resultados produzidos. Esta
interface foi escrita em Fortran e utiliza:
·
as
rotinas do modelo Mohid para a leitura e validação dos dados de entrada;
·
as
bibliotecas do MS Windows SDK (Software Development Kit) para a
geração de janelas;
·
as
bibliotecas do OpenGL (Open Graphics Language) para a
visualização dos resultados.
A
programação da interface segue os mesmos conceitos da programação por objectos
já utilizados na programação do modelo Mohid e foi desenvolvido pelos
mesmos autores do modelo Mohid. Este fato é importante de salientar,
pois garante que em desenvolvimentos futuros será sempre fácil de manter a
mesma interface gráfica sincronizada com o desenvolvimento do modelo.
A Mohid
GUI foi desenhada para correr em ambientes WindowsNT e Windows 2000 e pode
igualmente correr, com algumas limitações em outras plataformas.
4.1
Organização
de um projecto
A partir da
Mohid GUI, o utilizador tem a possibilidade de organizar o projecto em
várias simulações que por sua vez são constituídas por vários Runs. A
execução de um projecto normalmente será sempre constituída por mais do que uma
simulação, sendo por isso a organização hierárquica a mais adequada. Cada Run
necessita de ficheiros de dados e produz resultados para cada parte modular do
programa utilizada. Os resultados produzidos podem ser sob a forma de ficheiros
de continuação de cálculo, ficheiros com resultados em instantes
pré-seleccionados em toda a malha e ficheiros de resultados do tipo séries
temporais.
Para uma
melhor organização de todos os ficheiros associados, a interface gráfica do
modelo Mohid constrói automaticamente uma árvore de directorias, que
permite ao utilizador, caso deseje, encontrar mais facilmente um dado ficheiro
(a necessidade de encontrar um dado ficheiro é relativa, uma vez que a partir
da interface gráfica o utilizador pode fazer todas as tarefas). Esta árvore de
directorias é dividida na seguinte maneira:
·
na
directoria de topo reside o ficheiro que contém as informações sobre o projecto
e um sub-directoria para cada simulação que faz parte do projecto;
·
em
cada sub-directoria são criadas três directorias, um que contém os ficheiros de
dados das corridas, outro em que é executado o código do modelo e um terceiro
no qual são guardados os resultados do modelo;
·
cada Run
de uma simulação é identificada por um ID e a partir desse ID são construídos
os nomes dos ficheiros para cada parte modular do programa e um sub-directoria
na directoria dos resultados que contêm os resultados das séries temporais;
·
cada
parte modular tem um ficheiro de entrada de dados, um ficheiro de resultados
transientes com saídas das propriedades em toda a malha de cálculo e um
ficheiro que serve para continuar posteriormente o cálculo.
Os nomes
dos ficheiros de dados de entrada são construídos automaticamente da seguinte
maneira: nome de parte modular do programa + _ + ID + .dat. Por exemplo
o ficheiro de entrada de dados do módulo de turbulência será
“Turbulence_5.dat”, caso o Run tenha o ID 5. Os ficheiros de resultados
são construídos da mesma maneira, chamando-se por exemplo
“TransienteTurbulence_5.hdf”.
De notar
que este processo da geração de nomes de ficheiros, identificação por ID’s,
criação de directorias e sub-directorias é automatizada pela interface gráfica
do modelo Mohid. Na Figura 19 se mostra um exemplo deste
tipo de organização. Neste caso o projecto é chamado “Estuaries” e é
constituído por 12 simulações (Mira, Douro, Minho, etc.). Na Figura 19 são visíveis os Runs
correspondentes ao estuário do Mira, estando actualmente o “Run_Particle”
seleccionado. Na lista da direita aparecem as opções de cálculo para cada parte
modular do programa (Model, Hydrodynamic, Bottom, etc.), sendo aí dada a
opção ao utilizador de modificar os parâmetros de cálculo de cada uma das
partes modulares referidas.

Figura 19: Organização hierárquica das corridas no modelo
Mohid
4.2
Entrada
de dados
A entrada de
dados para modelos numéricos pode ser feita sob várias formas como, por
exemplo, por interacção directa com o utilizador, em ficheiros de dados
sequenciais ou em ficheiros com formato organizadas por tópicos.
A
organização dos ficheiros de dados do modelo Mohid é fruto de uma
experiência muita longa no desenvolvimento de ferramentas da família Mohid. É
frequente nos modelos numéricos se falar em erros de programação, mas o
fornecimento de dados pelo utilizador do modelo é normalmente uma das fontes de
erros mais significativa. Estes erros podem ter duas origens: distracção do
utilizador ao definir os dados ou desconhecimento das hipóteses e/ou dos
conceitos que estão que estão na base do modelo. Se estas fontes de erros não
são minimizadas, a operacionalidade do modelo não é garantida.
O modelo Mohid
recebe todos os dados através de ficheiros em formato ASCII (American
Standard Code for Information Exchange). Este formato é independente, tal
como o modelo Mohid, do sistema operativo. Estes ficheiros são organizados
por blocos de informação e por palavras-chaves, duma forma semelhante ao XML (Extensible
Markup Language), e podem ser construídas num editor de texto (tipo
“Notepad”) ou através da interface gráfica do modelo Mohid. No início do
cálculo o modelo verifica a consistência entre os dados fornecidos.
A Figura 20 mostra um ficheiro de dados
que é fornecido ao modelo Mohid. Neste caso trata-se dum ficheiro de
descargas de água para o rio Tejo, associadas a uma temperatura e uma
salinidade.
Figura 20: Ficheiro de dados do modelo Mohid
Na Figura 20 é facilmente visível a
organização por blocos da informação (uma descarga é incorporada entre as
linhas <begindischarge> e <enddischarge> e uma
propriedade de água associada a uma descarga entre as linhas <<beginproperty>>
e <<endproperty>>). Nesta figura é igualmente visível o
conceito de palavra-chave (keyword). Qualquer valor fornecido ao modelo Mohid
é precedido por uma palavra-chave, como por exemplo a palavra-chave
“Default_Flow_Value”.
Como já
referido anteriormente, o utilizador tem a possibilidade de construir estes
ficheiros a partir da interface gráfica do modelo Mohid. A Figura 21 mostra a interface gráfica
relativo ao ficheiro de dados da Figura 20.
Figura 21: Construção de um ficheiro de dados a partir da GUI
Todas as
partes modulares do modelo Mohid têm a mesma filosofia na construção dos
ficheiros de dados. Em todas as partes modulares as palavras-chave com o mesmo
sentido têm o mesmo nome. Se, por exemplo, o utilizador quer especificar o
intervalo entre saídas de resultados em toda a grelha, a palavra-chave é sempre
OUTPUT_TIME, independentemente da parte modular do programa, dando assim uma
consistência adicional ao modelo (mais informações sobre a saída de resultados
serão fornecidas mais à frente).
Além dos
ficheiros de dados numéricos acima descritos, que indicam ao modelo os
parâmetros de cálculo, existem dados que têm ser fornecidos por intermédio de
séries temporais ou de matrizes. Estes dados podem ser variados (dados
meteorológicos, vazões de rios, derrames acidentais, etc.), e podem ser
fornecidos no formato 1D, 2D ou 3D.
Ainda
existe a possibilidade destes dados serem variáveis ou não no tempo. O modelo Mohid
utiliza para estes casos sempre formatos muito parecidos, sendo assim mais
fácil para o utilizador do modelo fornecer os dados correctos. A Figura 22 mostra um exemplo de um
ficheiro com séries temporais que é lido pelo modelo Mohid. Neste caso
trata-se do fornecimento de dados 1D que são variáveis no tempo. A partir das
unidades do tempo (palavra-chave Time_Units) e da data inicial da série
(palavra-chave Série_Initial_Data) o modelo constrói todos os dados necessários
para o intervalo de execução. A interface gráfica do modelo Mohid é
acompanhada por um ficheiro de MS Excel, que contém macros que ajudam o
utilizador a escrever este tipo de ficheiro de dados.
Figura 22: Fornecimento de séries temporais
Os dados
que são fornecidos em matrizes têm um formato parecido com o formato indicado
na Figura 22 e que é sempre igual para cada
parte modular do programa Mohid.
4.3
Saída
de resultados
A saída de
resultados do modelo pode ser especificada pelo utilizador, através dos
ficheiros de dados. Como já referido anteriormente existem dois tipos de
resultados no modelo Mohid. Para cada parte modular do programa, existe
a hipótese de escrever os resultados para toda a grelha no formato HDF ou na
forma de séries temporais no formato ASCII. O intervalo entre as saídas dos
resultados pode ser especificado pelo utilizador, quer para as séries
temporais, quer para os resultados em toda a malha.
O formato
dos ficheiros de resultados na forma de séries temporais, é igual ao formato de
entrada de séries temporais (como indicado na Figura 22). A interface gráfica do
modelo Mohid é acompanhada por uma macro que permite importar estes
resultados numa folha de Excel. Igualmente é possível abrir estes
resultados directamente no Excel a partir da interface gráfica.
O formato adoptado
para a escrita de valores em toda a malha, o HDF, tem várias vantagens,
nomeadamente:
·
é
independente do sistema operativo em que formam escritos os ficheiros;
·
necessita
pouco espaço no disco, pois utiliza internamente um algoritmo de compressão;
·
é auto
descritivo;
·
é um
formato com um universo de utilização muito alargado.
O
desenvolvimento e a manutenção deste formato é da responsabilidade da NCSA (National
Center for Supercomputing Applications dos EUA).
4.4
Visualização
dos resultados
Qualquer pessoa
ligada a modelação sabe que a visualização dos resultados produzidos por um
modelo numérico pode ser um processo demorado e trabalhoso. Com o objectivo de
facilitar a análise dos resultados, a Mohid GUI incorpora um pós-
processador que se pode dividir duas partes. Existe uma parte em que o
utilizador pode seleccionar a informação que pretende representar e outra parte
a da visualização propriamente dita.
A selecção
da informação é muito facilitada pelo fato de que os ficheiros transitórios de
resultados são escritos em HDF. Ao abrir um ficheiro de HDF a Mohid GUI
mostra a árvore de informação contida neste ficheiro. Na Figura 23 são apresentados dois
ficheiros HDF, abertos com o browser da Mohid GUI e as hipóteses
para o utilizador ver as propriedades do cada conjunto de resultados, tal como
a hipótese de exportar os dados para outros formatos.

Figura 23: Opções do Browser do ficheiros transientes
Com os
resultados disponíveis, o utilizador tem a hipótese de gerar mapas de cores,
linhas de contorno, mapas de vectores, traçadores lagrangeanos ou diferenças
entre campos de cores. A representação pode ser feita da malha inteira ou de zooms
da malha em qualquer plano do modelo tridimensional (XY, XZ ou YZ), conforme as
especificações do utilizador. Existe a possibilidade de sobrepor vários mapas
ao mesmo tempo. Para cada tipo de mapas, o utilizador tem a possibilidade de
escolher entre vários tipos:
·
os
mapas de cores podem ser representados em escalas de cores contínuas ou
discretas, deixando ao utilizador a liberdade de escolher o tipo de escala a
utilizar (tons de azul, tons do arco íris, etc.). É possível representar
qualquer escala de cores imaginária;
·
as
linhas de contorno são um bom complemento para as escalas de cores, ou podem
representar uma outra propriedade, de modo a cruzar a informação representando
no campo de cores a evolução da propriedade representada com as linhas de
contorno;
·
os
mapas de vectores são indispensáveis para representar velocidades, pois
permitem, numa forma fácil, representar a intensidade e a direção ao mesmo
tempo. O utilizador da Mohid GUI tem a hipótese de escolher entre várias
formas de representar os mapas de vectores;
·
os
traçadores lagrangeanos podem ser visualizados com diferentes escalas de cores
ou com cor uniforme, permitindo ao mesmo tempo ao utilizador visualizar a
história da trajectória, que é muito útil para as manchas de petróleo.
Após a
selecção completa da informação a representar, o utilizador pode visualizar os
resultados na tela ou gravar as imagens como ficheiros independentes no disco
rígido. Um utilitário chamado “Sequencer” permite ao utilizador
controlar a velocidade da representação na tela, ou seja controlar o tempo real
versus o tempo simulado.
As figuras
gravadas no disco rígido podem ser utilizados para fazer animação em formato
“gif”, “avi” ou similares, recorrendo a programas disponíveis para este fim
(por exemplo o Paint Shop Pro).
5
Referências
Descrição Geral
Adcroft
A.J., Hill C.N., Marshall J., Representation of Topography by Shaved Cells in a
Height Coordinate Ocean Model, Mon. Weather Rev. 125 (1997) 2293-2315.
Decyk, V.
K., Norton, C. D. e Szymansky, B. - How to Express C++ Concepts in Fortran90.
Duffy, D. -
From Chaos to Classes, McGraw-Hill: London, 1995.
Leitão, P.
C. (1997) – Modelo de Dispersão Lagrangeano Tridimensional. Tese de Mestrado,
Universidade Técnica de Lisboa, Instituto Superior Técnico
Miranda,
R., Braunschweig, F., Leitão, P. Neves, R., Martins, F. and Santos, A. (2000) –
Mohid 2000, A Costal integrated object oriened model. Hydraulic Engineering Software VIII, WIT Press
Neves, R. J. J.
(1985) - Étude Experimentale et Modélisation des Circulations Trasitoire et
Résiduelle dans l’Estuaire du Sado. Ph. D. Thesis, Univ. Liège
Silva, S.
B. (1997) – Modelação Numérica de Derrames de Hidrocarbonetos no Mar:
Aproximação Lagrangeana do Transporte. Universidade Técnica de Lisboa,
Instituto Superior Técnico.
Modelo Hidrodinâmico
Abbott,
M.B., A. Damsgaardand & G.S. Rodenhuis, 1973. System 21, Jupiter, a design system for
two-dimensional nearly-horizontal flows. J. Hyd. Res., 1, p. 1-28.
Adcroft
A.J., Hill C.N., Marshall J., Representation of Topography by Shaved Cells in a
Height Coordinate Ocean Model, Mon. Weather Rev. 125 (1997) 2293-2315.
Arakawa, A.
and V. R. Lamb, 1977: Computational design of the basic dynamical processes of
the UCLA general circulation model. Methods in Computational Physics, 17,
174-265.
Arhan,
M., Colin de Verdière, A, and L. Mémery, The Eastern boundary of the
subtropical North Atlantic, J. Phys. Oceanogr., 24, 1295-1316, 1994
Blumberg,
A.F. and L.H. Kantha, 1985. Open boundary condition for circulation models. J.
of Hydraulic Engineering, ASCE, 111, 237-2555.
Braunschweig,
2001. Generalização de um modelo de circulação costeira para Albufeiras. Tese
de mestrado em Ecologia, Gestão e Modelação dos Recursos Marinhos. Universidade
Técnica de Lisboa. Instituto Superior Técnico. Lisboa, 2001.
Chippada
S., Dawson C., Wheeler M., A godonov-type finite volume method for the system
of shallow water equations, Computer methods in applied mechanics and
engineering. 151(01):105-130.
1998
Choi H. B.,
D. G. Kim e D. H. Kim (1997). A Numerical Tidal Model for the Southeast Asian Seas. Journal of Korean
Society of Coastal and Ocean Engineers. Vol. 9, No. 2, pp. 63-73, june 1997.
Coelho, H.
S., R. J. J. Neves, M. White, P. C. Leitão e A. J. Santos. A circulation model for the western
Iberia. Journal of Marine Systems. In press
Deleersnijder E. e J.-M. Beckers, 1992, On the use of the
sigma-coordinate system in regions of large bathymetric variations, Journal
of Marine Systems, 3, 381-390
Ferziger,
J., Perić, M., Computational methods for fluid dynamics, Springer, 1995.
Flather,
R.A., 1976: A tidal model of the nothweast European continental shelf. Mem. Soc. R. Sci. Liege, Ser. 6(10),
141-164.
Hellerman,
S. and M. Rosenstein, 1983. Normal monthly wind stress over the world ocean
with error estimates. Journal of Physical Oceanography, 13, 1,093-1,104.
Kantha, L.
H. and C. A. Clayson, 2000. Numerical Models of Oceans and Oceanic Processes.
International Geophysics Series. Volume 66. Academic Press.
Le Provost,
C., F. Lyard, J.M. Molines, M.L. Genco and F. Rabilloud, 1998. A Hydrodynamic
Ocean Tide Model Improved by assimilating a satellite altimeter derived
dataset. J. Geophys. Res. Vol. 103 N. C3, 1998.
Le Provost,
C., M.L. Genco, F. Lyard, P. Vincent, and P. Canceil, Spectroscopy of the world
ocean tides from a finite element hydrodynamic model, J. Geophys. Res., 99,
24,777-24,797, 1994.
Leendertsee
J., Liu S., A three-dimensional turbulent energy model for non-homogeneous
estuaries and coastal sea systems, in: Nihoul J. (Eds.), Hydrodynamics of Estuaries and Fjords, Elsevier,
Amsterdam, 1978 pp. 387-405.
Leendertsee,
J.J., 1967. Aspects of a computational model for long water wave propagation.
Rand Corporation, Memorandum RH-5299-RR, Santa Monica.
Leendertsee,
J.J., 1970. A water quality simulation model for well mixed estuaries and
coastal seas. Rand Corporation, Memorandum RM-6230-RC , Santa Monica.
Levitus, S.
and., T. P. Boyer, 1994. World Ocean Atlas 1994. Volume 4: NOAA Atlas NESDIS 4,
117pp.
Levitus,
S., R. Burgett and T. P. Boyer, 1994. World Ocean Atlas 1994. Volumes 1 and 2:
NOAA Atlas NESDIS 3, 99pp.
M.
Ruiz-Villarreal1*, P. Montero1, J.J. Taboada1, R. Prego2, P.C. Leitão3 and V.
Pérez-Villar1. Hydrodynamic
Model Study of the Ria de Pontevedra under Estuarine Conditions. Estuarine and
Coastal Shelf Science. In press.
Martins,
F., R. Neves, P. Leitão e A. Silva, 2001. 3D modeling in the Sado estuary using
a new generic coordinate approach. Oceanologica Acta, 24:S51-S62.
Martinsen,
Eivind A. e Harald Engedahl: Implementation and testing of a lateral boundary
scheme as an open boundary condition in a barotropic ocean model, Coastal
Engineering, 11, 603-627, 1987.
Neves R.,
Leitão P., Braunschweig F., Martins F., Coelho H., Santos A., Miranda R.: The
advantage of a generic coordinate approach for ocean modelling. Proceedings of
the Eighth International Conference Hydraulic Engineering Software HYDROSOFT
2000,12-14 Junho 2000, Lisboa.
Neves,
R.J.J. e Silva, A.J.R., 1991, An Extension of the Boussinesq Equations to Deep
Water - Computer Modelling in Ocean Engng.,1991. A.S. Arcilla,
M. Pastor, O.C. Zienkiewicz & B.A. Schrefler, eds. Balkema,
Rotterdam, p. 301-309.
Neves, R.J.J.,
1985. Étude experimentale et modélisation mathématique des circualtions
transitoire et résiduelle dans l’Estuarie du Sado. Ph.D. Thesis, Université de
Liège, Belgique.
Paillet,
J. and H. Mercier, 1997. An inverse model of the eastern North Atlantic general
circulation and thermocline ventilation. Deep Sea Res., 44 (8), 1293-1328.
Palma, E.
D. and R. P. Matano, 1998: On the implementation of passive open boundary
conditions for a general ciruclation model: The barotropic mode. Journal of
Geophysical Research, 103,. 1319-1342..
Palma, E.
D. and R. P. Matano: On the implementation of passive open boundary conditions
for a general circulation model: The three-dimensional case. Journal of
Geophysical Research, 105,. 8605-8627.
Roed, L.P.;
Smedstad, O.M. (1984). Open boundary conditions for forced waves in a rotating
fluid. SIAM Journal on Scientific and Statistical Computing, vol.5, no.2, p. 414-26, 1984.
Ruiz-Villarreal,
M., 2000. Parameterization of turbulence in the ocean and application of a 3D
baroclinic model to the Ria de Pontevedra PhD. Thesis. University of Santiago
de Compostela.
Santos, A.J.P. & R.J.J. Neves, 1991. Radiative artificial
boundaries in ocean barotropic models. Computer Modelling in Ocean Engng.,1991.
A.S. Arcilla, M. Pastor, O.C. Zienkiewicz & B.A. Schrefler, eds. Balkema,
Rotterdam, p. 373-383
Santos,
A.J.P., 1995. Modelo hidrodinâmico tridimensional de circulação oceânica e
estuarina. Tese de doutoramento. Instituto Superior Técnico, Universidade
Técnica de Lisboa, 273 pp.,Lisboa.
Silva,
A.J.R., 1991, Modelação Matemática Não Linear de Ondas de Superfície e de
Correntes Litorais, Tese apresentada para obtenção do grau de Doutor em
Engenharia Mecânica. IST,
Lisboa.
Stelling,
G.S., 1983. On the construction of computational methods for shallow water flow
problems. Ph.D. Thesis, Tecnische Hoegeschool to Delft.
Stevens,
D.P. (1991): The Open Boundary Condition in the United Kingdom Fine Resolution
Antarctic Model. Journal of Physical Oceanography, 21, pp. 1494-1499.
Trenberth,
K. E., W. G. Large and J. G. Olsen, 1990: The mean annual cycle in global wind
stress. J. Phys. Oceanogr., 20, 1742-1760.
Vinokur,
M., 1989. An analysis of finite-difference and finite-volume formulations of
conservation laws. J.
Comp. Phys., 81, p. 1-52.
Módulo de Deriva
Allen,
C. M. (1982). Numerical
simulation of contaminant dispersion in estuary flows. Proc. R. Soc. London. A 381, 179-194 (1982).
Bork, I.
and Maier-Reimer, E. (1978) - On the Spreading of Power Plant Cooling Water in
a Tidal River Applied to the River Elbe. Advances in Water Resources Vol. 1
No.3 1978
Buchanan
I., N. Hurford (1988) - Methods for predicting the physical changes in oil
spilt at sea. Oil & Chemical Pollution, 4(4), pp. 311-328
Cohen, Y.,
D. MacKay, W.Y.Shiu (1980). Mass
transfer rates between oil slicks and water. The Canadian Journal of Chemical
Engineering. Vol. 58.
Costa, M. V.
(1991) - A Three-Dimensional Eulerian-Lagrangian Method for Predicting Plume
Dispersion in Natural Waters - Diplôme d’Etudes Approfondies Européen en
Modélisation de l’Environnement Marin - ERASMUS.
Costa, M.
(1999) - Evolução de hidrocarbonetos derramados nas zonas costeiras e
estuarinas. Dissertação de Mestrado, Faculdade de Ciências e Tecnologia,
Universidade de Coimbra, Coimbra
Delvigne
G.A.L., C.E. Sweeney (1998) - Natural Dispersion of Oil. Oil & Chemical
Pollution. 4, pp. 281-310
Dippner, J.
(1993) - A Lagrangian model of phytoplankton growth dynamics for the Northern
Adriatic Sea. Continental Shelf Research. Vol. 13, No. 2/3, pp. 331-355, 1993.
Fay J.A.
(1969) - The spread of oil slicks on a calm sea. Oil on the Sea, Plenum Press,
NY, pp. 53-63
Fingas
M.F., D.A. Kyle, E. Tennyson (1993) - Physical and Chemical Studies on
Dispersants: The effect of Dispersant Amount and Energy. Proceedings of the
Sixteenth Arctic and Marine Oil Spill Program Technical Seminar, Environment
Canada, Ottawa, Ontario, pp. 861-876
Fischer, H.
B. ; List, E. J. ; Koh, R. C. Y. ; Imberger, J. and Brooks, N. H. (1979) -
Mixing in Inland and Coastal Waters. Academic Press, New York, U.S.A., 483p.
Flores H.,
A. Andreatta, G. Llona, and I. Saavedra (1998). Measurements of oil spill
spreading in a wave tank using digital image processing. Oil and hydrocarbon
spills, modeling, analysis and control, WIT Press, Southampton, UK, pp.165-173
Garcia-Martinez,
Reinaldo, Henry Flores-Tovar (1999) - Computer Modeling of Oil Spill
Trajectories with a High Accuracy Method. Spill Science & Technology
Bulletin, Vol. 5, No.5/6, pp. 323-330
Huang,
J.C., F.C. Monastero (1982). Review of the state-of-the-art of oil spill simulation models. Final
Report submitted to the American Petroleum Institute.
Kelsey, A.,
Allen, C. M., Beven, K. J. and Carling, P. A. (1994) - Particle Tracking Model
of Sediment Transport. Mixing and Transport in the Environment. Ed. WILEY,
419-442.
Kung,
Chen-Shan, Huo-Hsu Su, Yi-Ching Chen, Yao-Li Teng Simulation of Oil Spills in a
Harbor
Lehr, W.J.,
R.J. Fraga, M.S.Belen and H.M. Cikerge (1984). A new technique to estimate
initial spill size using a modified Fay-type spreading formula, Marine
Pollution Bulletin, 15(9), pp. 326-329
Leitão, P.
C. (1997) – Modelo de Dispersão Lagrangeano Tridimensional. Tese de Mestrado,
Universidade Técnica de Lisboa, Instituto Superior Técnico
Mackay D.,
R.S. Matsugu (1973) - Evaporation rates of liquid hydrocarbon spills on land
and water. Canadian Journal Chemical Engineering, pp. 434-439
Mackay D.,
I. A. Buistt, R. Mascarenhas, S. Paterson (1980) - Oil spill processes and
models. Environment Canada Manuscript Report No. EE-8, Ottawa, Ontario
Monteiro,
A. J. , Neves, R. J. and Sousa, E. R. (1992) - Modelling Transport and
Dispersion of Effluent Outfalls. Water Science and Technology WSTED4, Vol. 25,
No. 9, p 143-154, 1992.
Mooney, M.
(1951). The viscosity of a concentrated suspension of spherical partiles.
Journal Colloidal Science,
10, 162-170
Neves, R. J. J.
(1985) - Étude Experimentale et Modélisation des Circulations Trasitoire et
Résiduelle dans l’Estuaire du Sado. Ph. D. Thesis, Univ. Liège
Neves, R.
J. J. and Martins, F. A. (1996) - Modelação Lagrangeana dos processos de
transporte na Ria Formosa. 5a
Conferência Nacional sobre a Qualidade do Ambiente, Aveiro.
Mansur, L.
, Price D. M. (1992). Oil-RW: A mathematical model for predicting oil spills
trajectory and weathering. Hydraulic and Environmental Modelling: Coastal
Waters. Proceedings of the Second International Conference on Hydraulic and
Environmental Modelling of Coastal, Estuarine and River Waters, Volume 1, pp.
201 - 212.
Monteiro,
A. J. (1995) - Dispersão de Efluentes Através de Exutores Submarinos. Uma
contribuição para a modelação matemática. Universidade Técnica de Lisboa,
Instituto Superior Técnico.
NOAA
(1994). ADIOSTM (Automated Data Inquiry for Oil Spills) user’s
manual. Seattle: Hazardous Materials Response and Assessment Division, NOAA.
Prepared for the U.S. Coast Guard Research and Development Center, Groton
Connecticut, 50 pp.
Ozmidov, R.
V. (1990) - Diffusion of Contaminants in the Ocean. Oceanographic Sciences
Library, Kluwer Academic Publishers, 283 p.
Payne J.R.,
B.E. Kirstein, G.D. McNabb, J.L. Lambach, R. Redding, R.E. Jordan, W. Hom, C. De
Oliveira, G.S. Smith, D.M. Baxter, R. Gaedel (1984) - Multivariate analysis of
petroleum weathering in the marine environment – Sub arctic. Environment
Assessment of the Alaska Continental Shelf. Final reports of the principal
investigations, Vol. 22, US Dept. Commerce, NOAA/NOS/OAD. US Dept. Interior, MMS, Vol. II
Portela, L.
(1996) - Modelação matemática de processos hidrodinâmicos e de qualidade da
água no Estuário do Tejo. Dissertação para obtenção do grau de Doutor em
engenharia do Ambiente, Instituto Superior Técnico, Universidade Técnica de
Lisboa.
Rasmussen,
D. (1985). Oil Spill Modelling – A tool for cleanup operations. Proc. 1985. Oil
Spill Conference, American Petroleum Institute, pp. 243-249
Reed M.
(1989) - The physical fates component of the natural resource damage assessment
model system. Oil & Chemical Pollution, 5, pp. 99-123
Rijn, L. C.
(1989) - Handbook Sediment Transport by Currents and Waves. Delft Hydraulics,
Report H 461, June 1989.
Rodrigues,
V., Neves, R. J. J. & Miranda, R (1996) - Modelação ecológica e da
qualidade da água em zonas costeiras. 5a
Conferência Nacional sobre a Qualidade do Ambiente, Aveiro.
Shiau, B.
(1991). Computer modelling of oil pollutants transport on the water. Computer
modellnig in Ocean Engineering: Vol. 91, pp. 467-475.
Silva, S.
B. (1997) – Modelação Numérica de Derrames de Hidrocarbonetos no Mar:
Aproximação Lagrangeana do Transporte. Universidade Técnica de Lisboa,
Instituto Superior Técnico.
Stiver W.,
D. Mackay (1984) - Evaporation rate of spills of hydrocarbons and petroleum
mixtures. Environmental Science and Technology, 18(11), pp. 834-840
Stolzenbach
K.D., O.S. Madsen, E.E. Adams, A.M. Pollack and C.K. Cooper (1977) - A review
and evaluation of basic techniques for predicting the behavior of surface oil
slicks. MIT Sea Grant Program, Report No. 222, Massachusetts Institute of
Technology, Cambridge, Massachusetts
Sullivan,
P. J. (1971). Longitudinal dispersion within a two-dimensional turbulent shear
flow. Journal Fluid Mech., vol. 49, part 3, pp. 551-576 (1971).
Tennekes H.
e Lumley (1972) - A First Course in Turbulence. Edited by MIT Press.
Varlamov,
Sergey M., Kazuko Abe (2000) - Oil Spill Initial Stage Spreading and Physical
Properties Model. Reports of Research Institute for Applied Mechanics, Kyushu
University, No. 119 pp. 89-101
Yang W. C.,
H. Wang (1977) - Modelling of oil evaporation in aqueous environment. Water
Research, 11, pp. 879-887
Woods, J.
D. and Onken, R. (1982) – Diurnal variation and primary production in the ocean
– preliminary results of a Langrangian ensemble model. Journal of Plankton
Research, 4, 3.
Miranda,
R., R. Neves, H. Coelho, H. Martins, P. C. Leitão and A. Santos, 1999:
Transport and Mixing Simulation Along the Continental Shelf Edge Using a
Lagrangian Approach, Bol. Inst. Esp. Oceanogr., 15,39-60
Miranda, R.
(1999) - Nitrogen biogeochemical cycle modeling in the North Atlantic ocean. .
MsC. Thesis – IS, 1999, Lisbon.
EPA (1985)
– Rates, constants, and kinetic formulations in surface water quality modeling
(2nd ed.). USEPA, Report EPA/600/3-85/040.